

Wearable configuration-changing exo-limb robot
A wearable and robotic technology, applied in the field of robotics, can solve the problems of poor load capacity, low degree of freedom, poor flexibility, etc., and achieve the effects of various working methods, light weight, and reduced frustration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
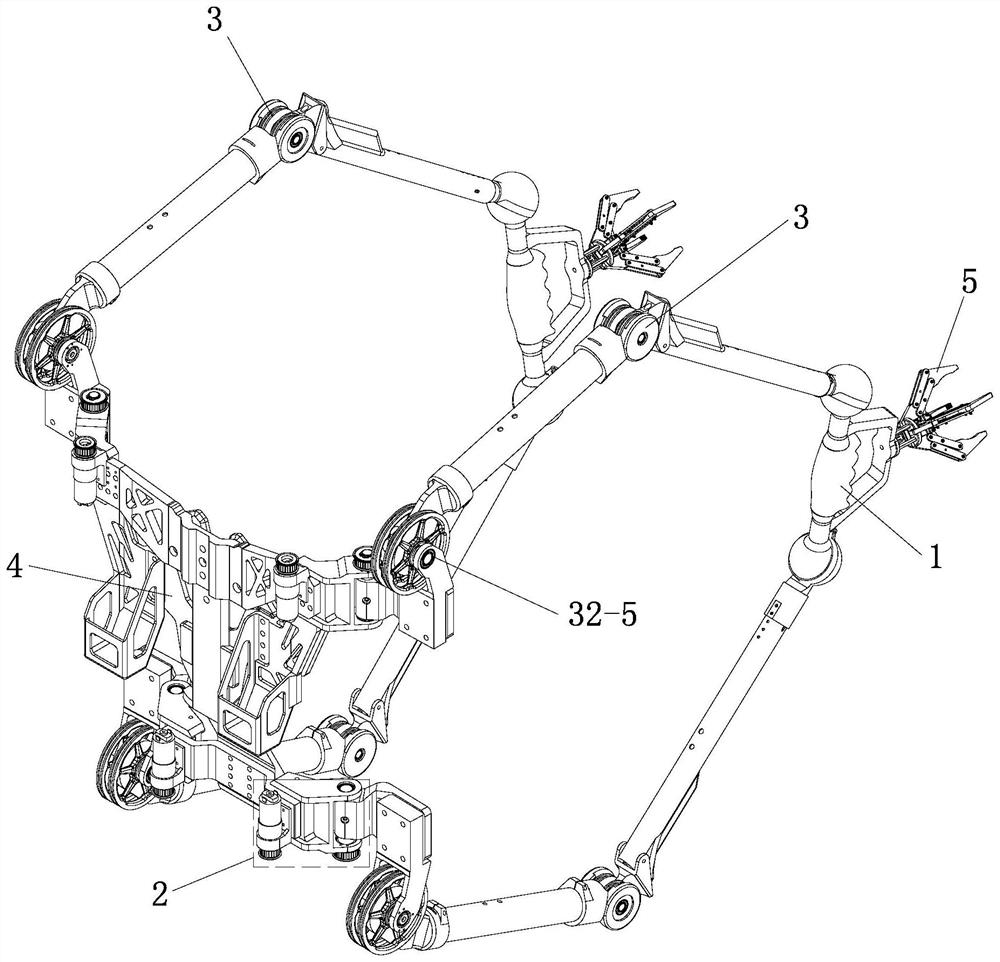
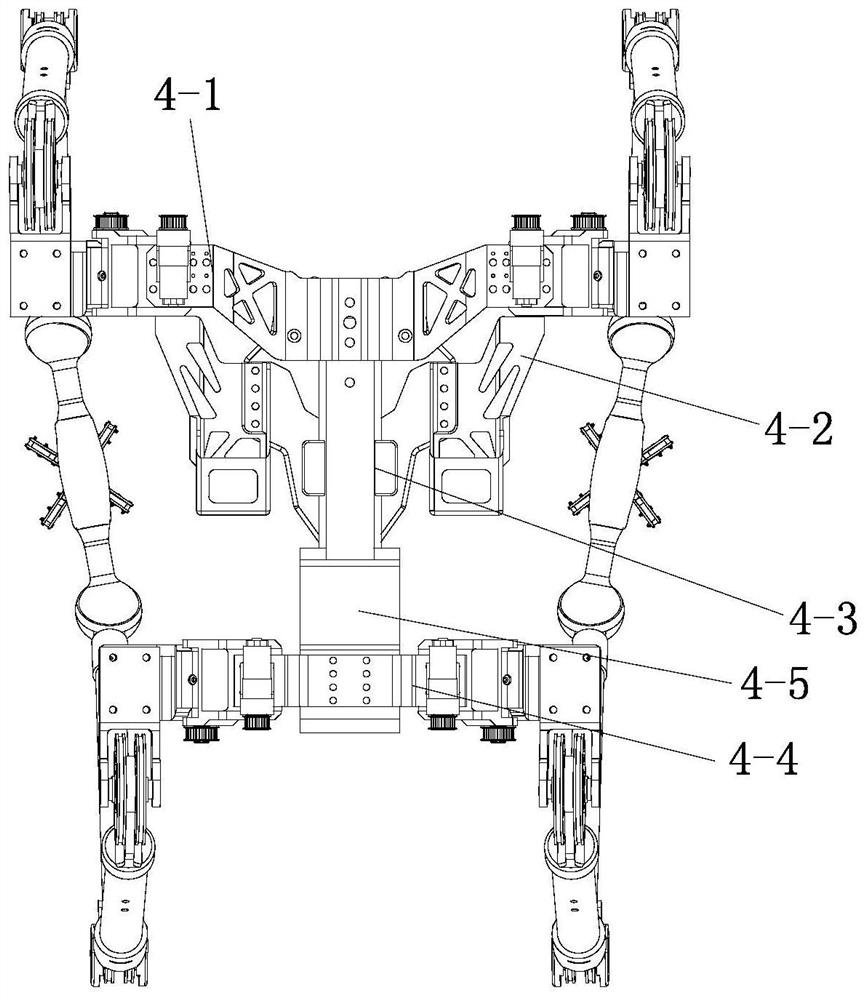
[0032] see figure 1 As shown, the wearable variable configuration extremity robot of this embodiment includes a back suspension frame 4, a manipulator 5, two handles 1, two sets of arm swing mechanisms 3 and four sets of shoulder inward and outward swing mechanisms 2;
[0033] Two sets of shoulder retraction and outward swing mechanisms 2 are respectively arranged on the left and right sides of the back suspension frame 4;
[0034] Every two sets of shoulder inward and outward swing mechanisms 2 are connected with a set of arm swing mechanisms 3, and the two sets of arm swing mechanisms 3 are arranged symmetrically. A handle 1 is installed at the end of each set of arm swing mechanisms 3, and each handle 1 is There is a manipulator 5 connected.
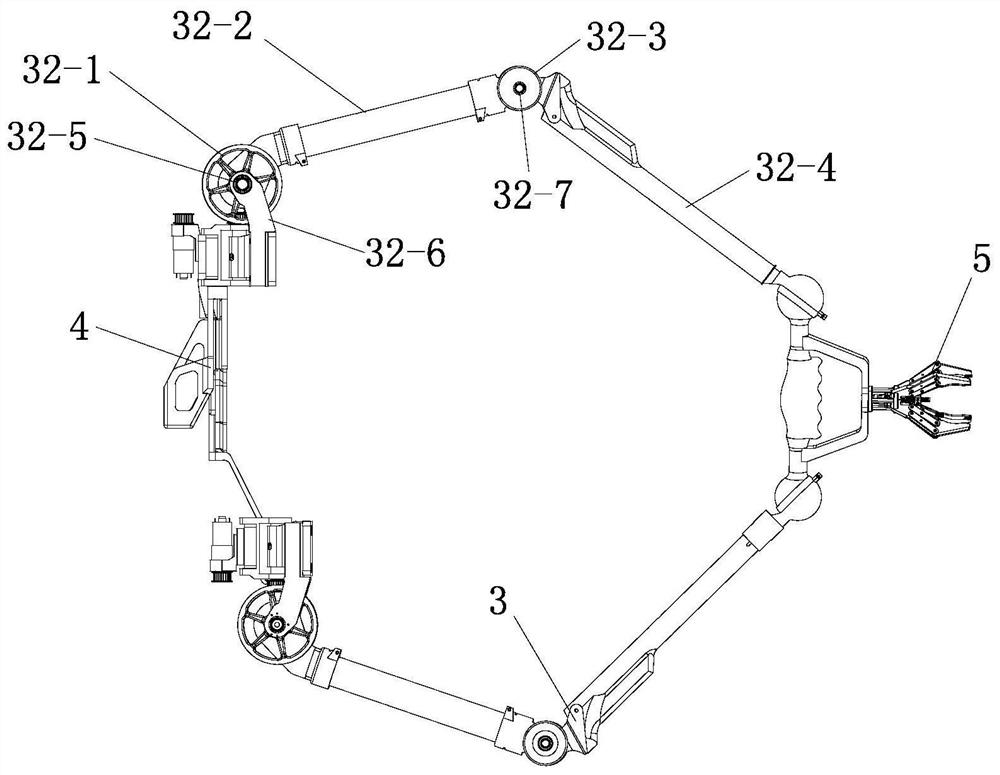
[0035] Such as Figure 2-Figure 5 As shown, prefer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More