Total drive torque output method for unmanned vehicle
A technology of unmanned vehicles and output methods, which is applied in the field of trajectory tracking control of four-wheel independent drive unmanned electric vehicles, which can solve the problems of reducing control accuracy, prone to instability, and failure to guarantee control accuracy and vehicle stability. , to achieve the effect of ensuring the following performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
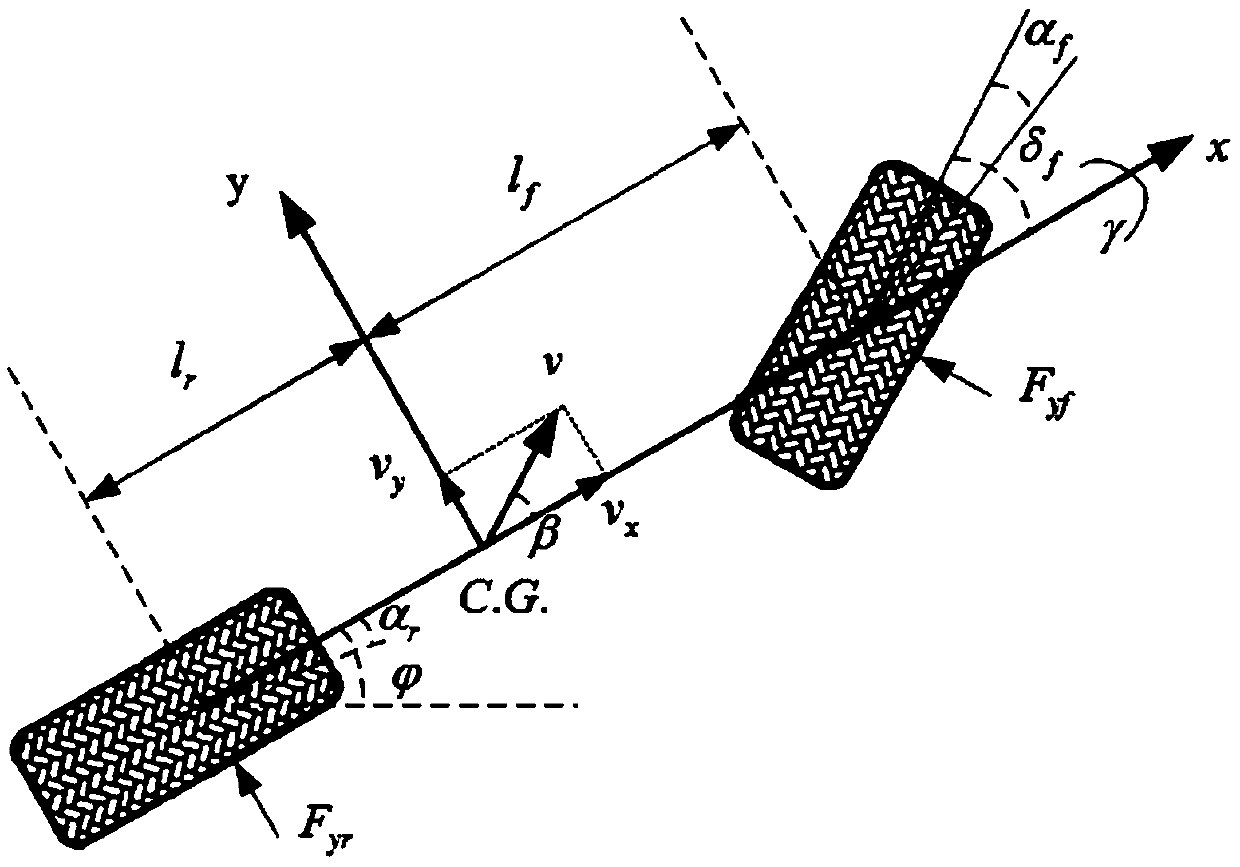
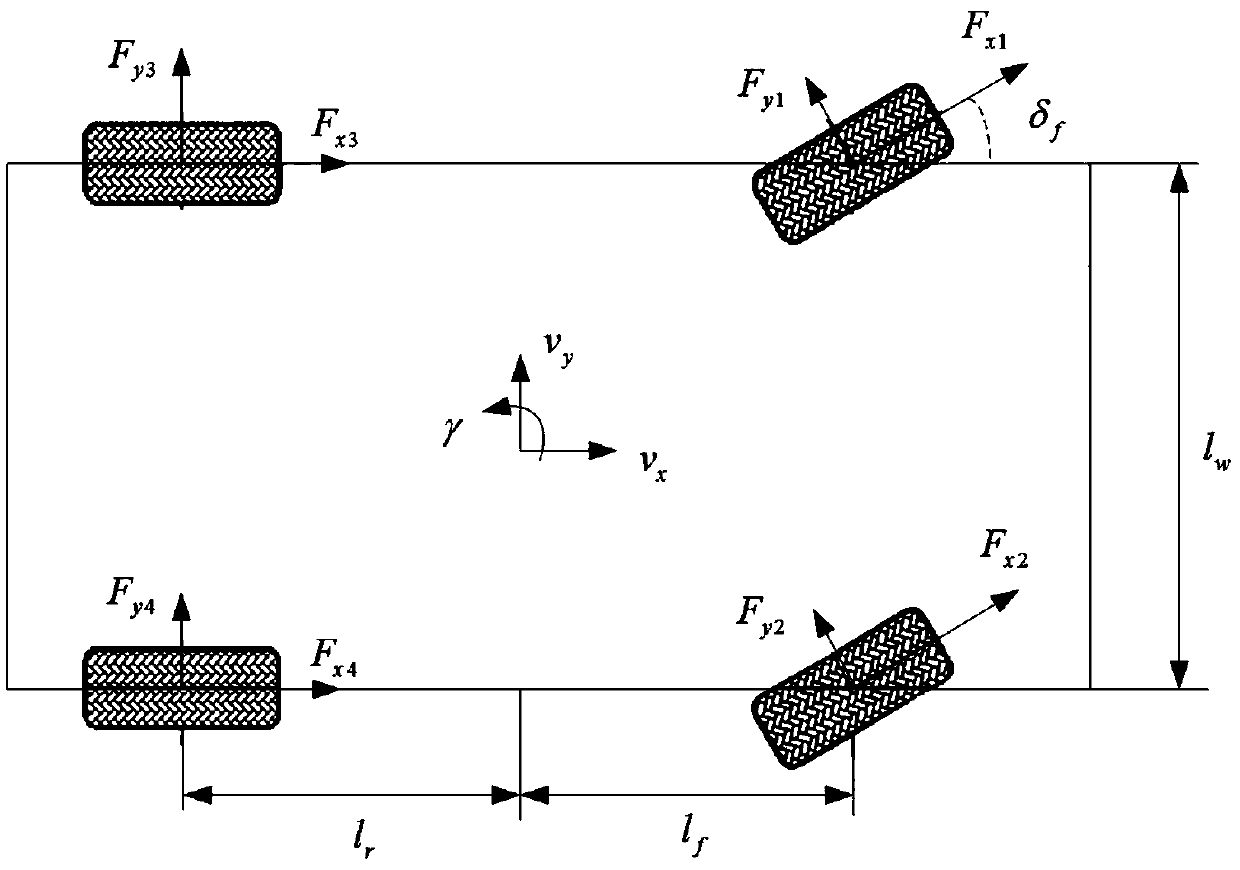
[0024] The present invention will take four-wheel-independent electric vehicles (FWID-EV, Four-Wheel-Independent electric vehicle) as the object, and study the trajectory tracking control strategy of unmanned vehicles. Requirements for driving stability in low-attachment conditions.
[0025] In order to improve the stability and accuracy of trajectory tracking of vehicles on high-speed and low-lying roads, the present invention provides a trajectory tracking algorithm for four-wheel independent drive unmanned electric vehicles. In view of the fact that the previous research content of unmanned vehicle trajectory tracking algorithm does not consider vehicle stability control and longitudinal vehicle speed control, and is not suitable for four-wheel independent drive electric vehicles. The invention proposes a layered trajectory tracking control strategy for four-wheel independently driven unmanned electric vehicles.
[0026] The trajectory tracking strategy designed by the pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com