

UAV slam method based on hybrid visual odometry and multi-scale map
A technology of visual odometer and UAV, which is applied in the direction of navigation computing tools, navigation, instruments, etc., can solve the problems that are not suitable, the feature point method and the direct method cannot well adapt to the positioning requirements of UAV, and achieve relief Calculating pressure, realizing real-time pose estimation and environment perception, and improving safety performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in detail below with reference to the accompanying drawings.
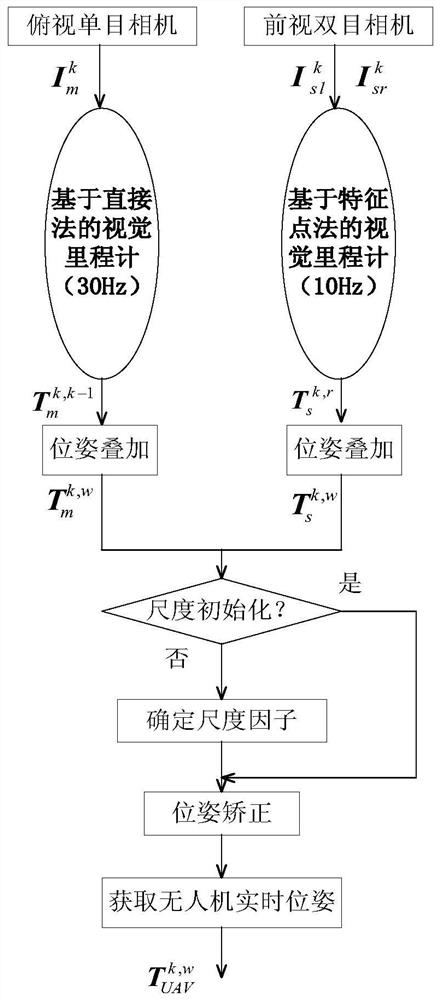
[0059] figure 1 A system block diagram of a mixed visual milemeter of the present invention, a mixed visual milemeter contains two threads based on a single-visual visual milemeter based on a direct method and a biopsy milemeter based on the feature point method. The drone platform is equipped with a single-eyed camera and a front-view binocular camera. The single-grade camera acquires 30 frames per second, and the two-machine camera acquires 10 frames per second. The airborne computer simultaneously turns on two threads, and the main thread runs a visual milemeter based on the direct method at a frequency of 30 Hz, and the other thread runs a visual milemeter based on the feature point method at a frequency of 10 Hz. If you get the synchronized single-grade camera image, Image corresponding to the left and right camera of the double-discipline camera will As an input ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More