

Simultaneous localization and mapping (SLAM) method for unmanned aerial vehicle based on mixed vision odometers and multi-scale map
A visual odometry, UAV technology, applied in navigation calculation tools, measuring devices, instruments, etc., can solve the problem that the feature point method and the direct method can not well adapt to the positioning requirements of the UAV, and are not suitable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
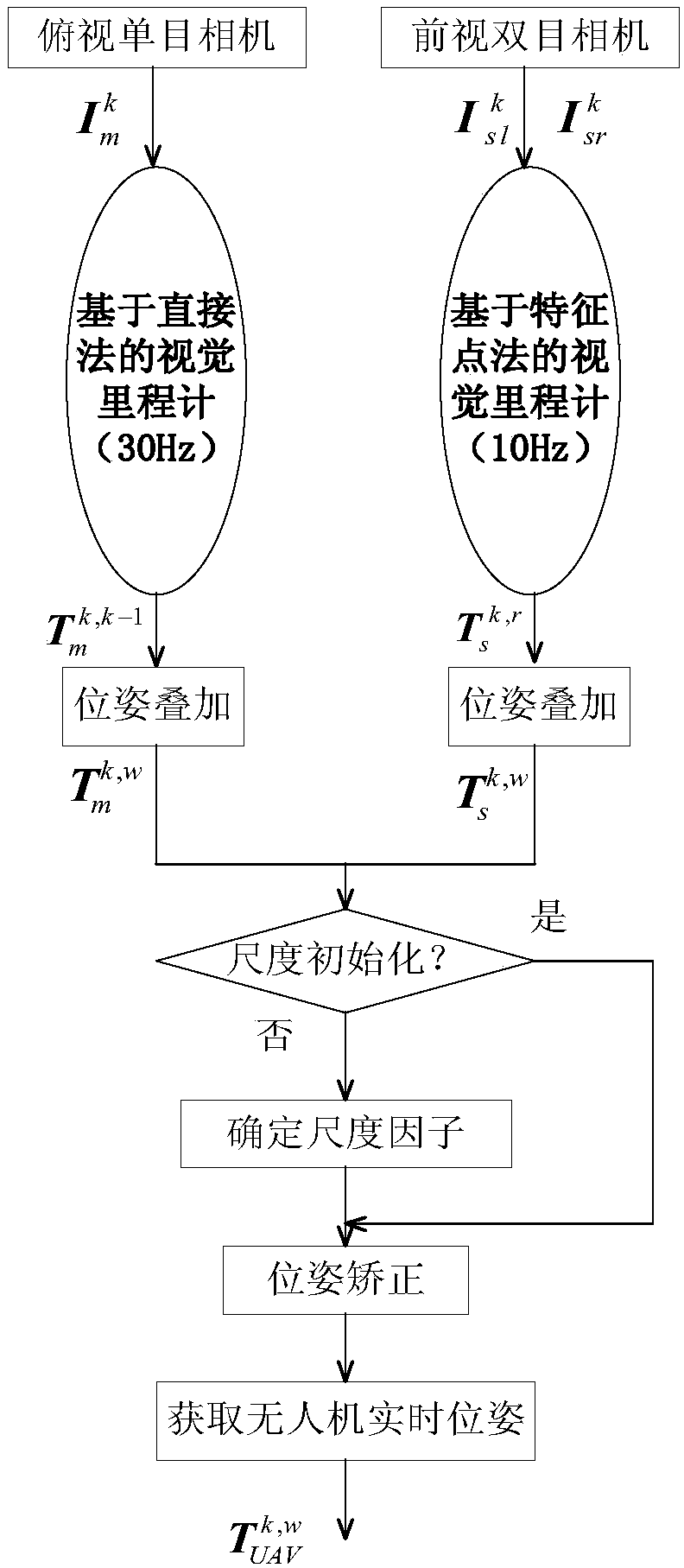
[0058] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0059] figure 1 It is a system block diagram of the hybrid visual odometer of the present invention, and the hybrid visual odometer includes two threads of a monocular visual odometer based on a direct method and a binocular visual odometer based on a feature point method. The UAV platform is equipped with a top-down monocular camera and a forward-looking binocular camera. The monocular camera collects 30 frames of images per second, and the binocular camera collects 10 frames of images per second. The onboard computer starts two threads at the same time, the main thread runs the visual odometry based on the direct method at a frequency of 30Hz, and the other thread runs the visual odometry based on the feature point method at a frequency of 10Hz. If the synchronized monocular camera image is acquired at time k Images corresponding to the left and right cameras o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More