

Method and system for autonomous landing of UAV based on photoelectric-inertial combined guidance
A technology of inertial combination and photoelectric tracking system, applied in control/adjustment system, navigation, surveying and mapping and navigation, etc., can solve problems such as difficult to play a guiding role, and achieve the effect of maintaining long-term pose accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the drawings.
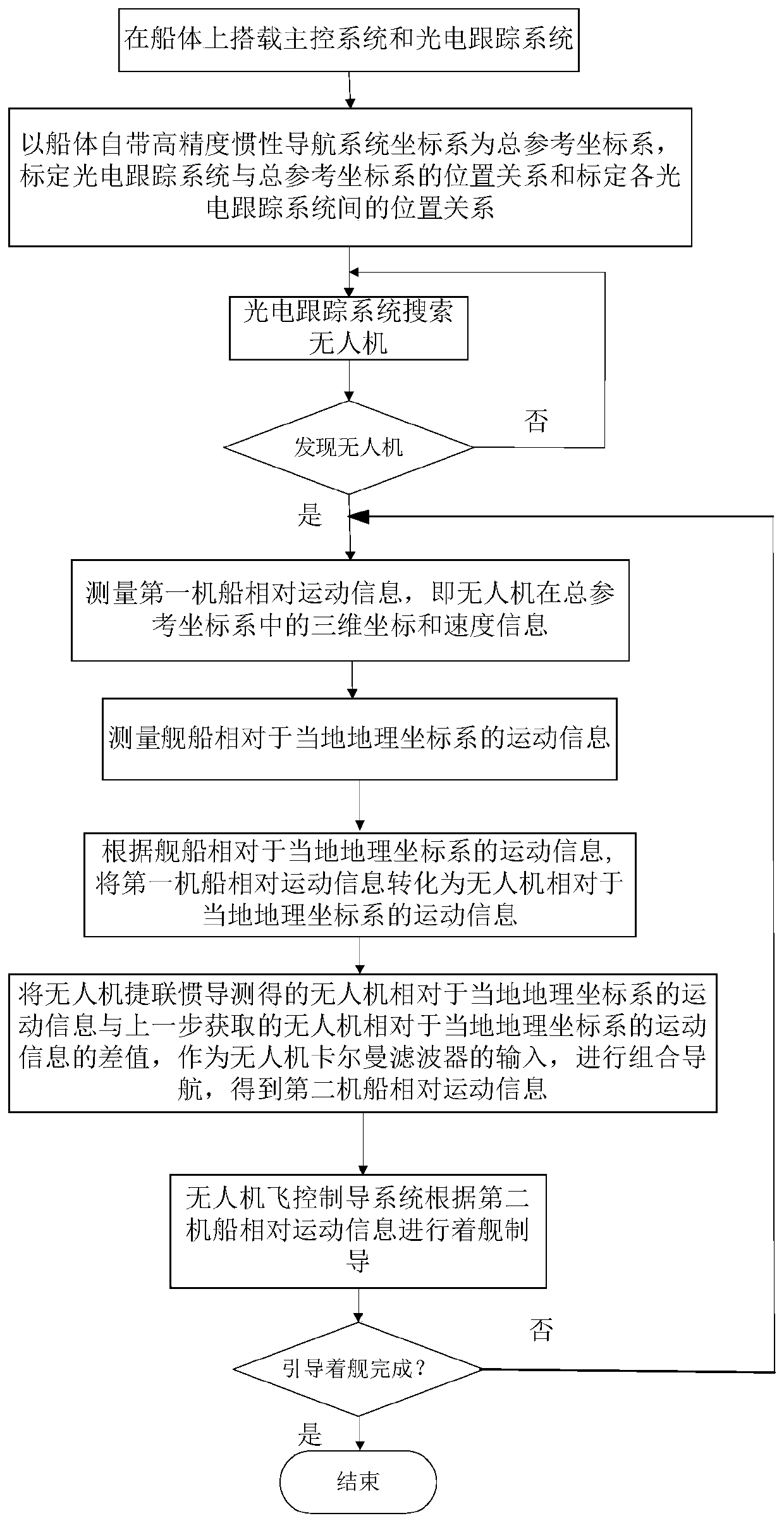
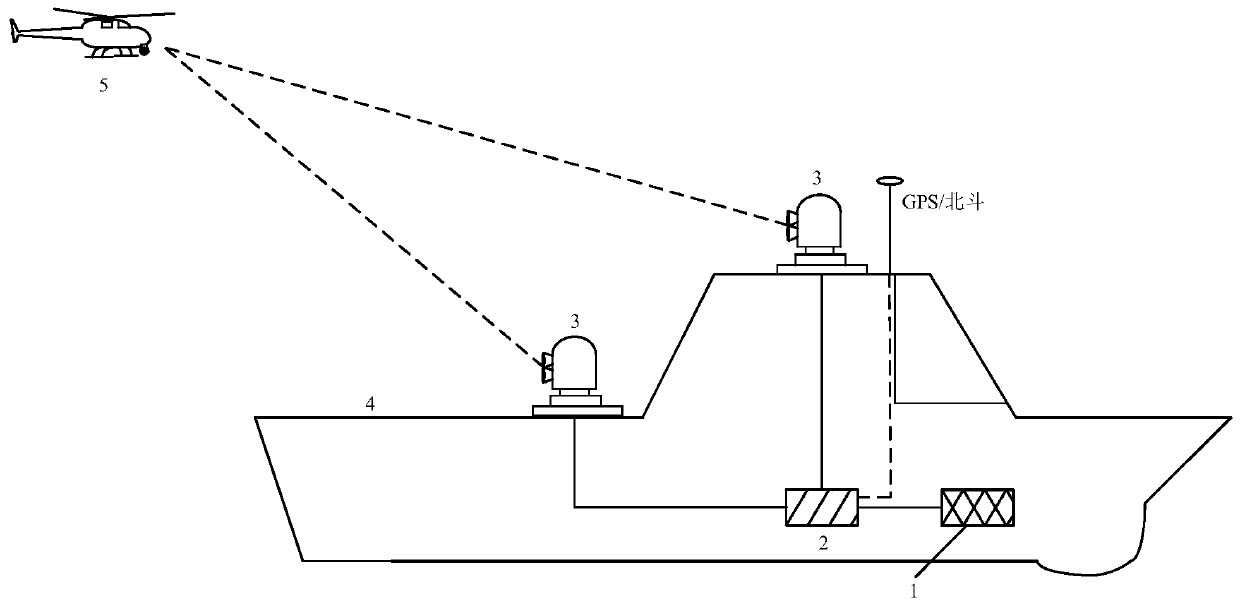
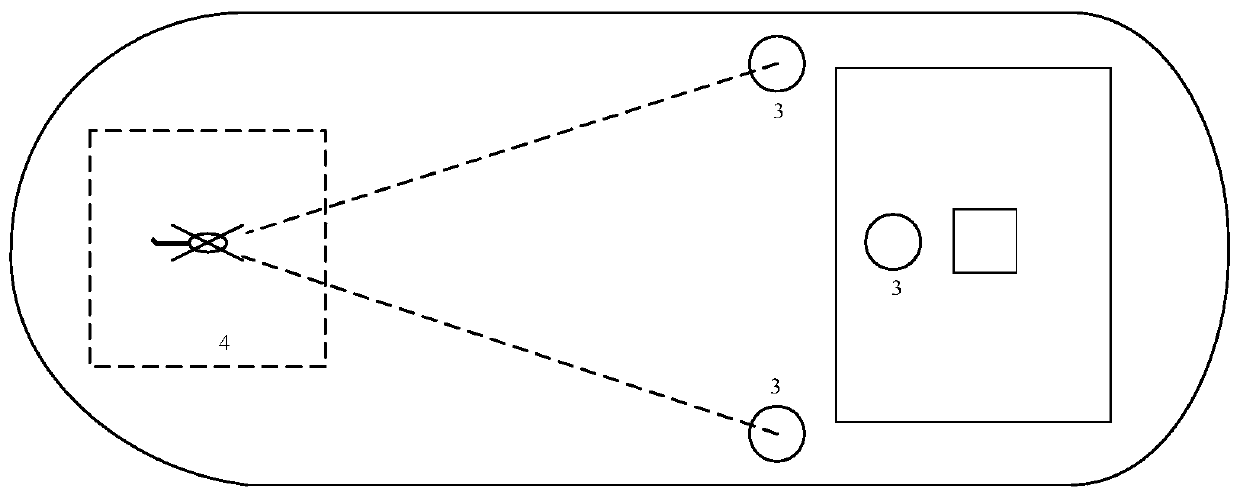
[0054] See figure 1 , Picture 10 , The autonomous landing method for drones provided by the present invention includes the following steps:
[0055] 1) Build the system:
[0056] The main control system and at least one photoelectric tracking system are set on the hull of the ship. The photoelectric tracking system includes a photoelectric platform. The photoelectric platform is equipped with an optical system and a photoelectric platform strapdown inertial navigation system for providing posture information of the photoelectric platform. Optical system includes camera and laser rangefinder;
[0057] 2) Calibration:
[0058] Using the coordinate system of the ship's own inertial navigation system as the total reference coordinate system, calibrate the relative position relationship between each photoelectric tracking system and the total reference coordinate system, and calibrate the relat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More