

Polling robot for transformer substation
A technology of inspection robots and robots, which is applied in the field of intelligent robots, can solve problems such as difficulty in effectively collecting information, prone to falling, and decreased discharge efficiency, so as to improve the ability to overcome obstacles and climb slopes, increase the recognition rate, and improve accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
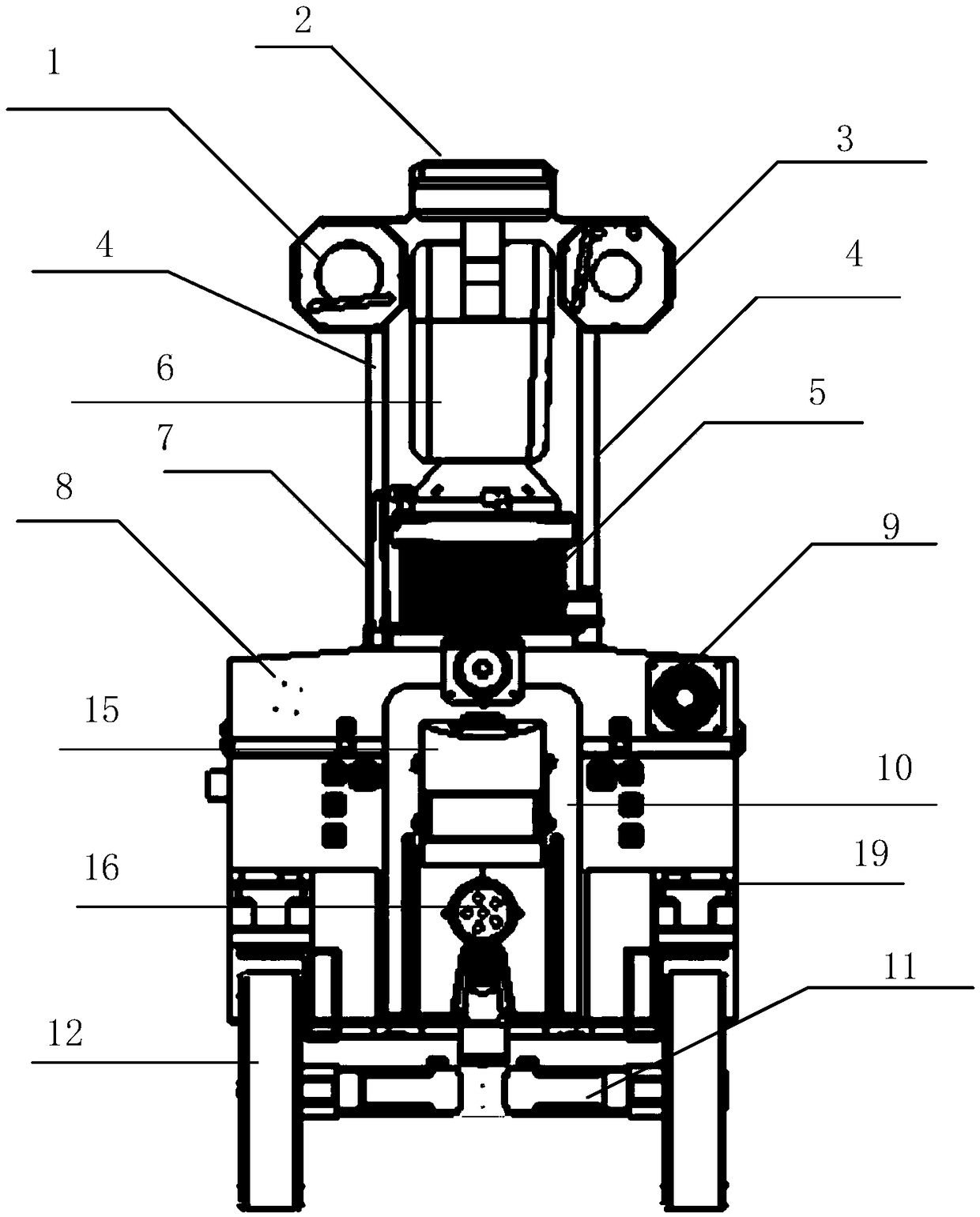
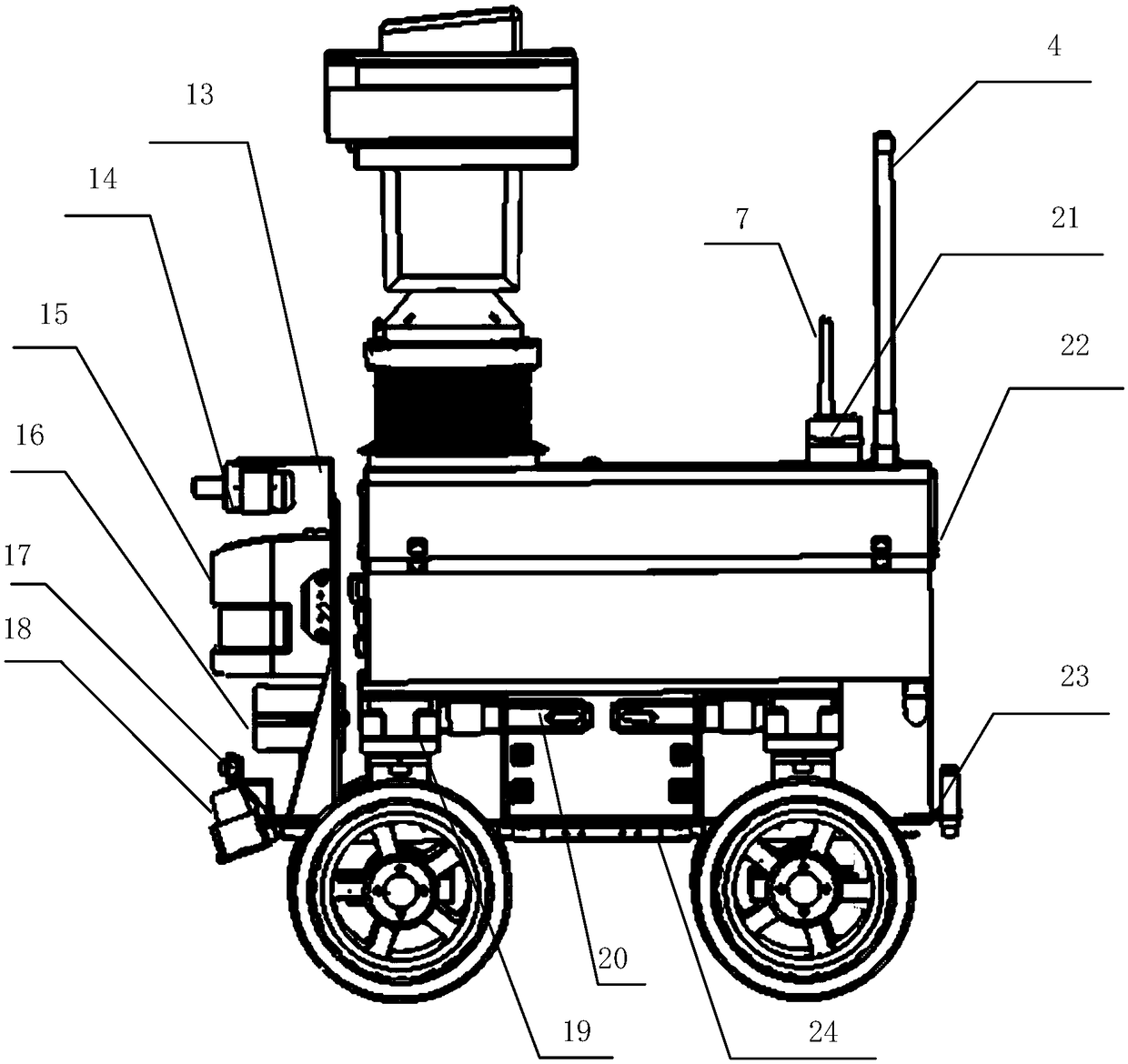
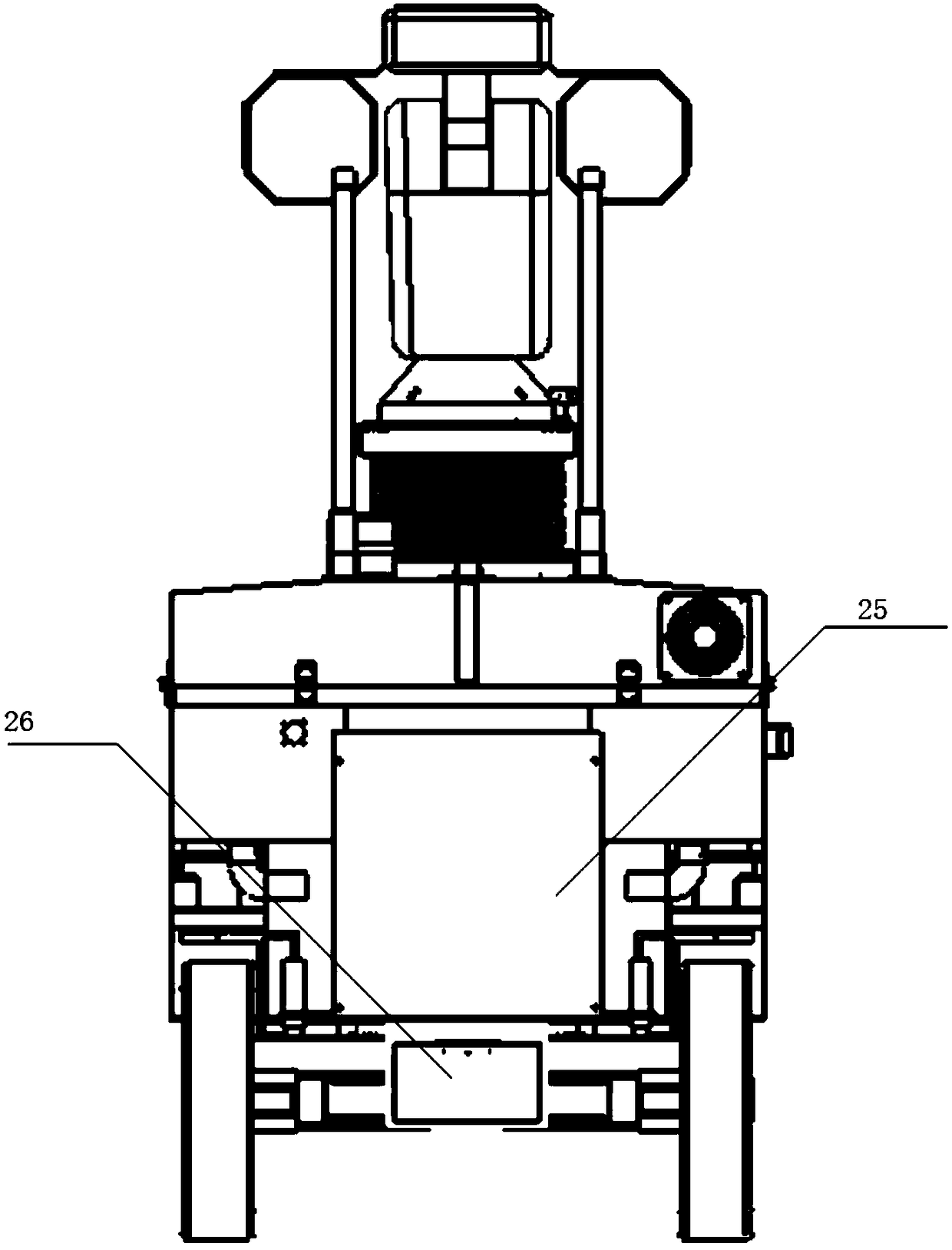
[0069] The substation inspection robot of the present invention includes a main body 8, the main body 8 is arranged on the base plate 24, the four corners of the bottom of the main body 8 are provided with wheels 12, the four wheels 12 support the base plate 24, and the inner side of each wheel 12 is provided with a motion servo motor 11, the main body 8 The positions on both sides are provided with a rotating platform 19 and a steering servo motor 20.
[0070] Main body 8 is provided with shell 22, and cloud platform 6 is arranged on the front end of the shell 22 top of main body 8 by the elevating rod that is fixed on the base plate 24, and visible light camera 3 and thermal imager 1 are all arranged on the cloud platform 6, and can lift The rod moves up and down; the top and rear end of the housing 22 of the main body 8 is provided with an AP antenna 4, a zigbee antenna 7 and a status indicator light 21; the upper left of the front wall of the housing 22 of the main body 8 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More