Positioning methods for trackless navigation AGV
A positioning method and trajectory technology, applied in electromagnetic wave re-radiation, radio wave measurement system, utilization of re-radiation, etc., can solve problems such as large amount of calculation and complex control algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
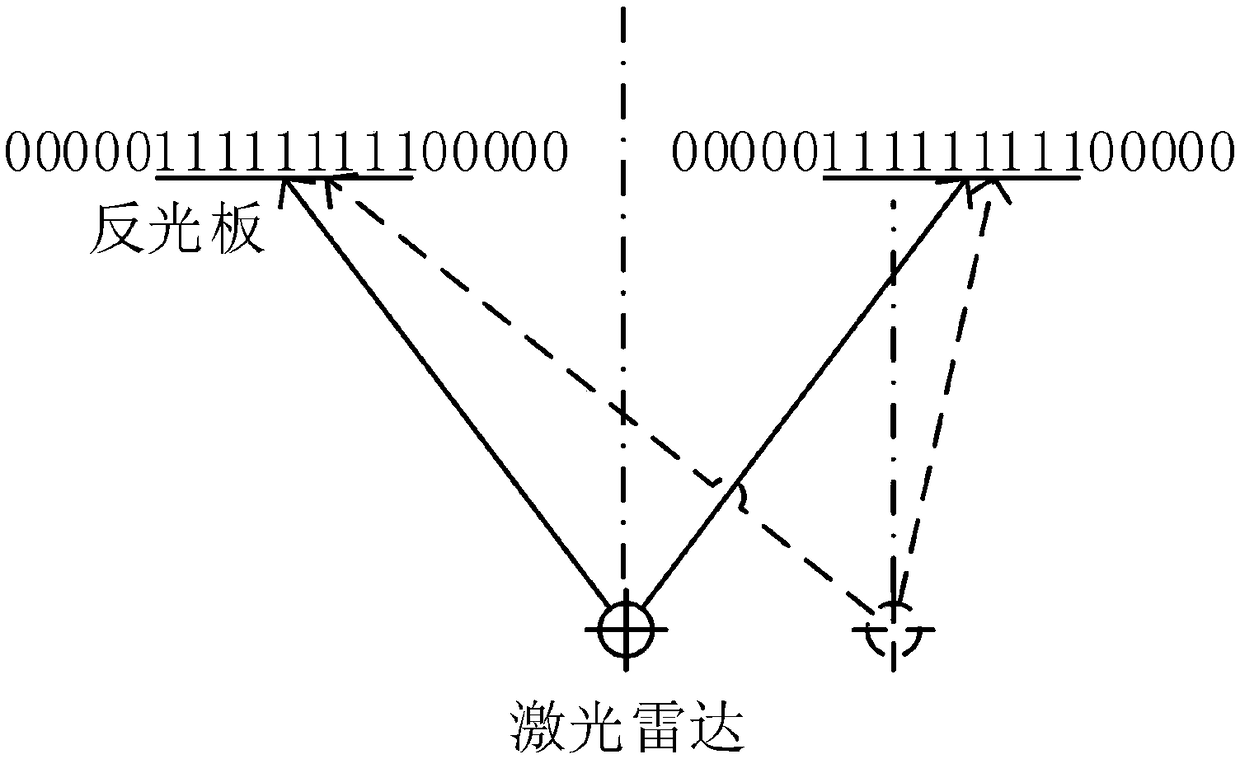
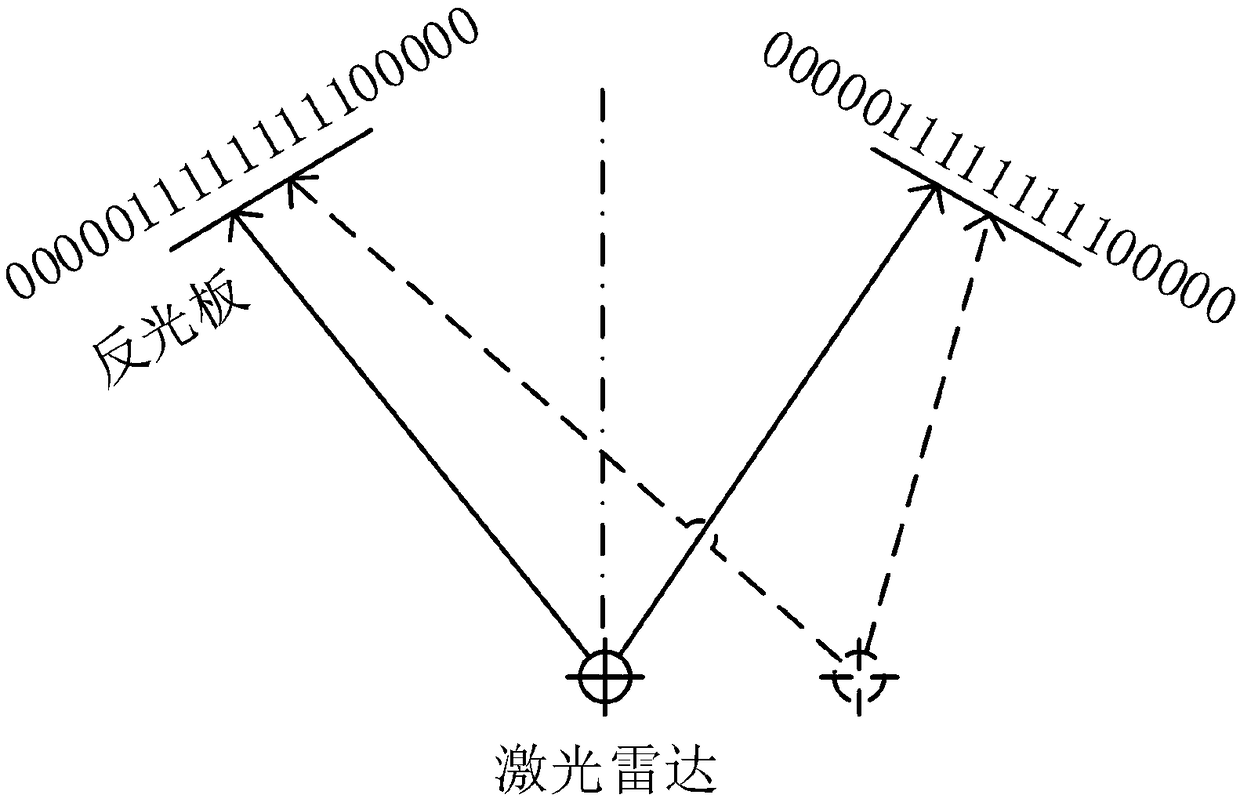
[0022] refer to figure 1 , a positioning method for a trackless navigation AGV, comprising:
[0023] The AGV scans the first reflective plate and the second reflective plate through the lidar, wherein the first reflective plate and the second reflective plate are arranged in the first area; the first reflective plate and the second reflective plate are vertical On the working plane of the AGV, the track of the first reflector scanned by the laser radar forms a first line segment, and the track of the second reflector scanned by the laser radar forms a second line segment, and the first reflector i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More