A control method of 3D welding positioning system based on monocular measurement
A welding positioning and control method technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of low welding positioning accuracy, and achieve the effects of simple control, low welding positioning accuracy and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The control method of the control method of the 3D welding positioning system based on monocular measurement of the present invention will be described in more detail below in conjunction with the schematic diagram, which shows a preferred embodiment of the present invention, and it should be understood that those skilled in the art can modify the description herein. the present invention while still achieving the advantageous effects of the present invention. Therefore, the following description should be understood as the broad knowledge of those skilled in the art, but not as a limitation of the present invention.
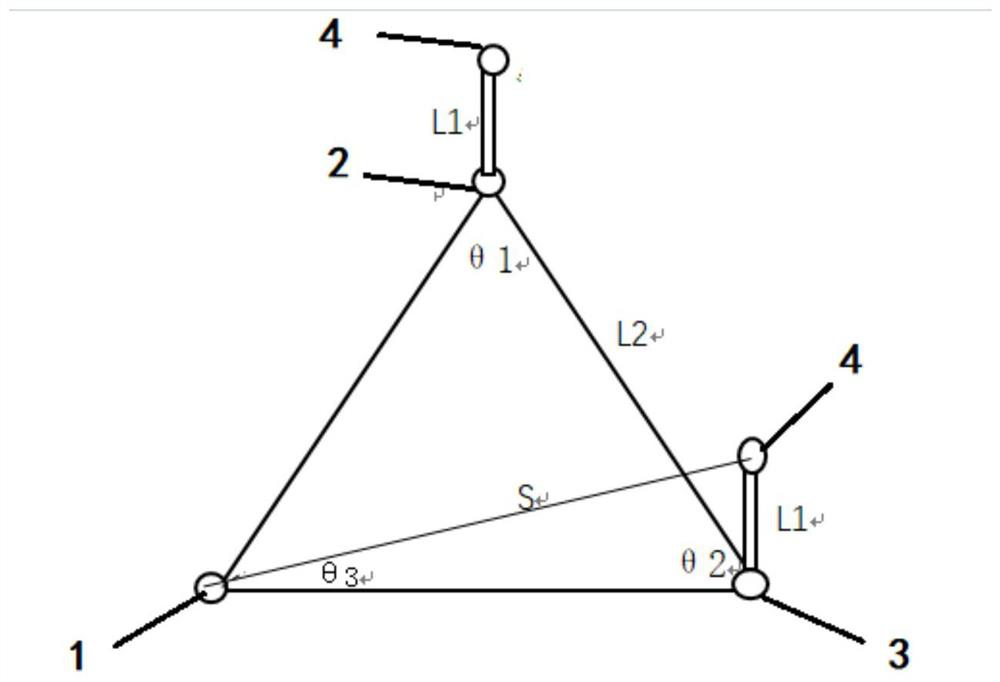
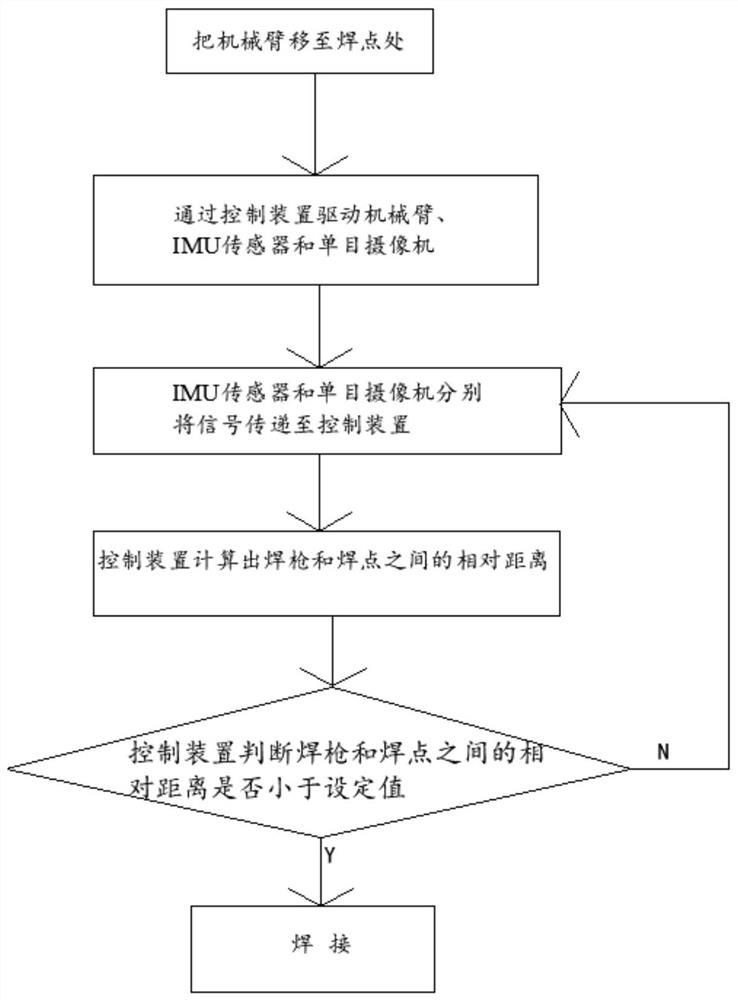
[0021] In this embodiment, a control method of a 3D welding positioning system based on monocular measurement is proposed, including: a mechanical arm, an IMU sensor fixed on the mechanical arm, a monocular camera, and a control device; wherein the mechanical arm The welding needle is set on the top; the IMU sensor and the monocular camera are fixed; the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More