

Control method for intelligent shopping guide robot system and computer readable storage medium
A robot system and control method technology, applied in the field of robots, can solve the problem that shopping guide robots cannot be found by customers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Exemplary embodiments of the present invention will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present invention are shown in the drawings, it should be understood that the invention may be embodied in various forms and should not be limited to the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present invention and to fully convey the scope of the present invention to those skilled in the art.
[0033] Any equivalent structure or equivalent process transformation made by using the contents of the description and drawings of the present invention, or directly or indirectly used in other related technical fields, is also included in the scope of patent protection of the present invention.
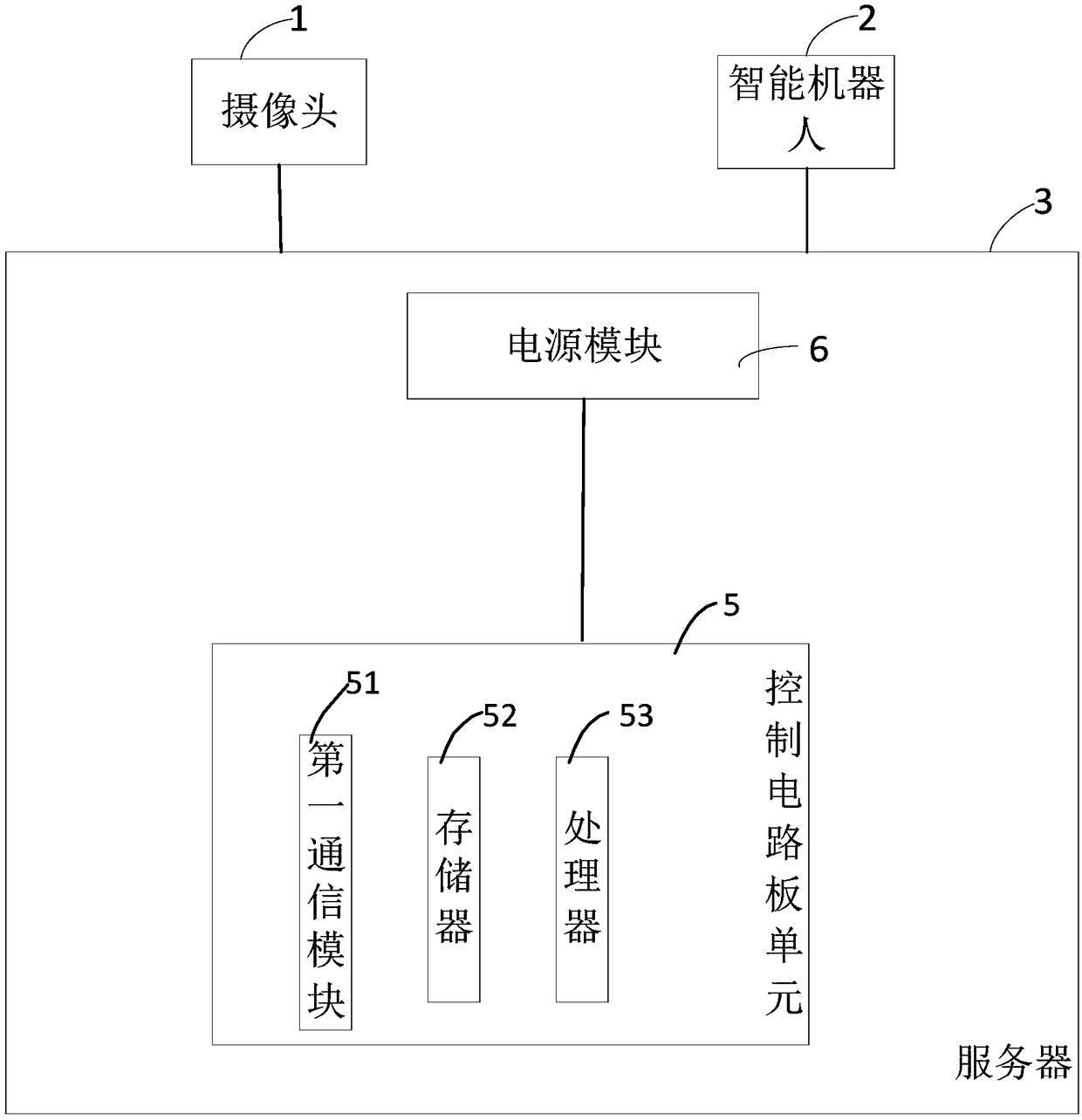
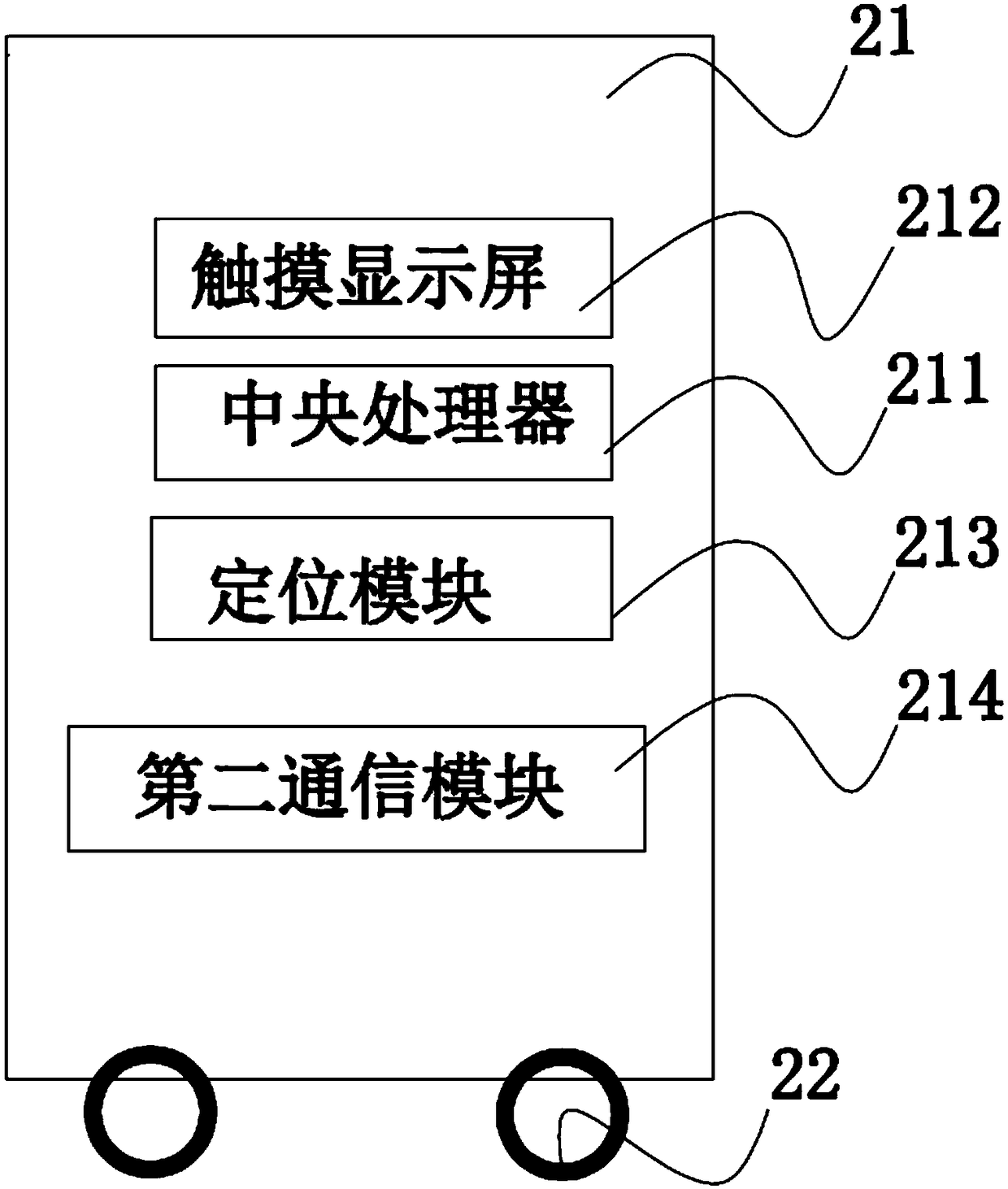
[0034] Please also refer to figure 1 with 2 , a specific embodiment of the present invention provides an intelligent shopping guide robot system, in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More