

Space multi-robot autonomous navigation method oriented to geostationary orbit target operation
A technology of geostationary orbit and target operation, applied in the direction of integrated navigator, etc., can solve the problem of low navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The technical solution of the present invention will be further introduced below in combination with specific implementation methods and accompanying drawings.
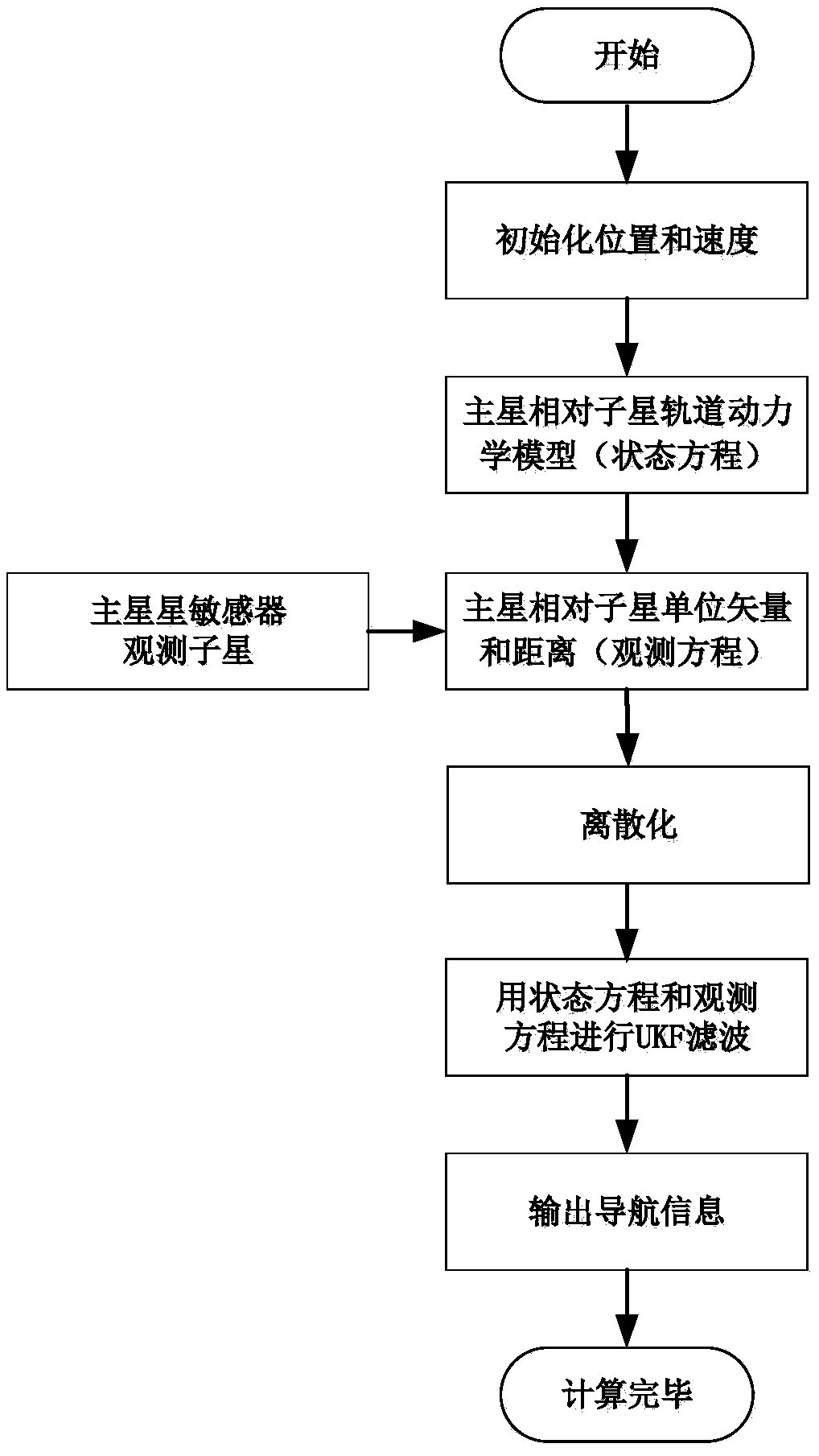
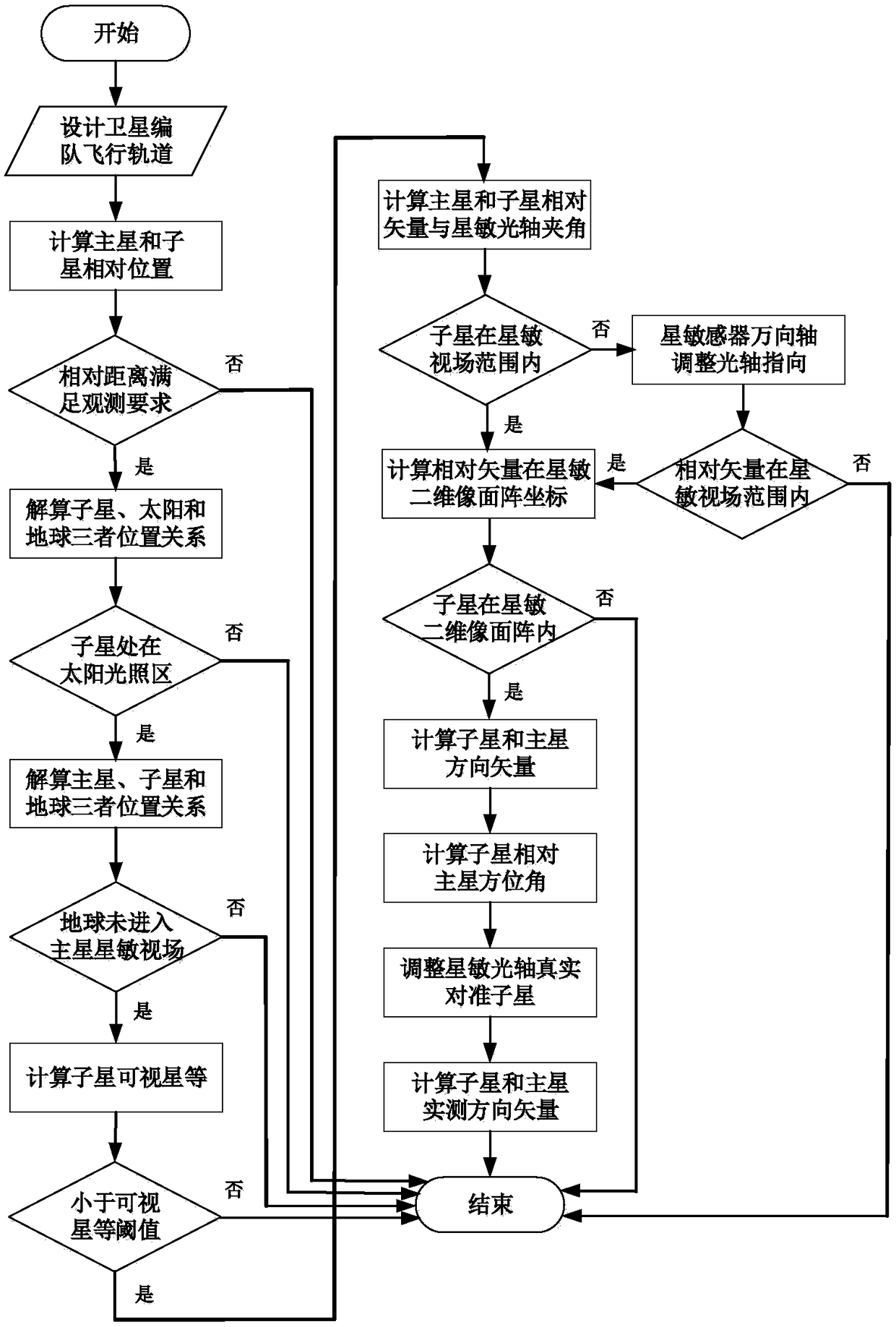
[0098] This specific embodiment discloses a space multi-robot autonomous navigation method for geostationary orbit target operation, such as figure 1 and figure 2 shown, including the following steps:
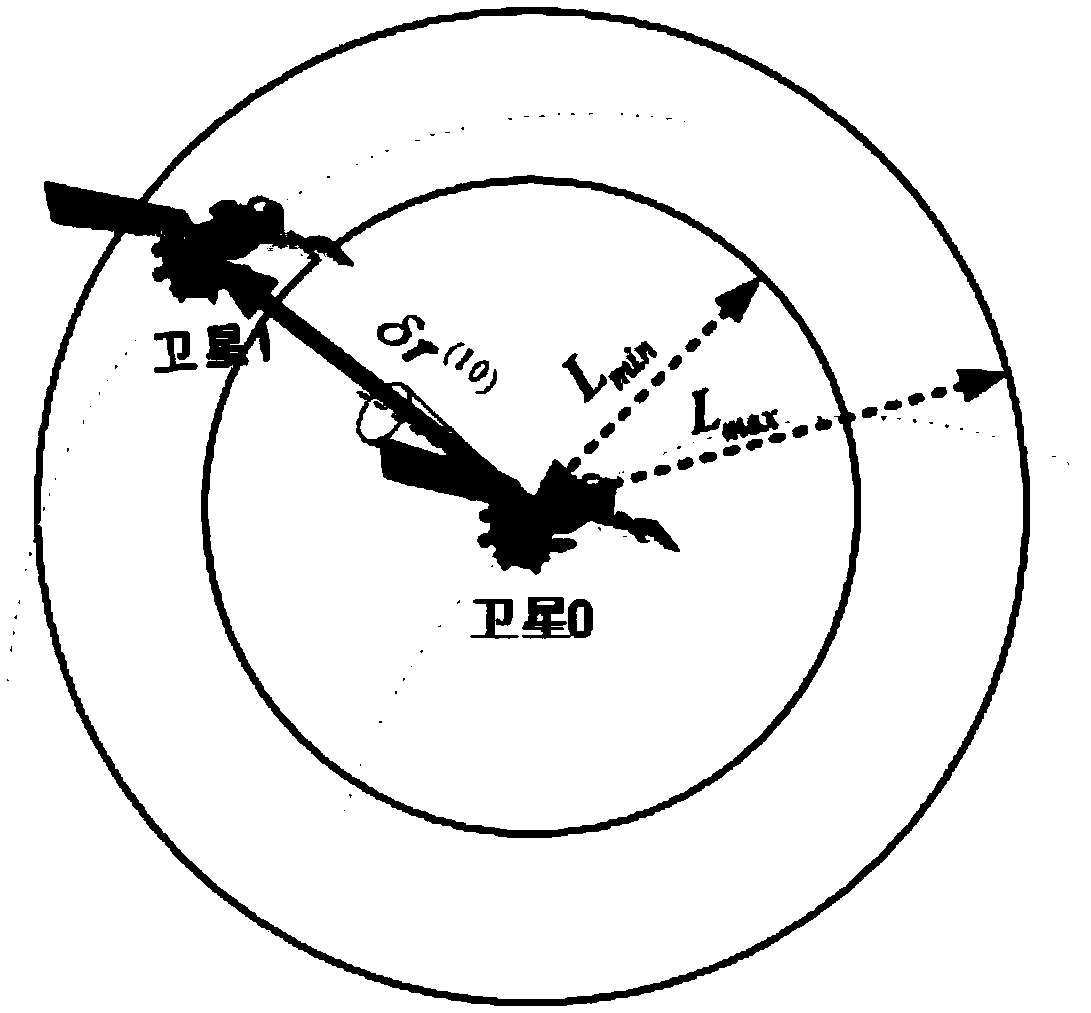
[0099] S1: Taking the GEO target satellite as the in-orbit service object, set the two space robots as the main star and the sub-star respectively, and design the formation flight configuration and orbit parameters of the main star and the sub-star; the orbit parameters include the orbital semi-major axis a, orbital eccentricity e, Orbital inclination i, right ascension of ascending node Ω, argument of perigee ω, perigee time t p ;
[0100] S2: According to the relative orbital dynamics model of the satellite in the earth-centered inertial coordinate system, establish the state model of the autonomous naviga...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More