

A mapping method and device for a global visual coordinate system and a robot arm coordinate system
A technology of visual coordinate system and mapping method, applied in the field of mapping method and device of global visual coordinate system and mechanical arm coordinate system, can solve problems such as inefficiency and error, and achieve high mapping conversion accuracy, high efficiency and fast automatic conversion calculation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Example embodiments provide a visual coordinate system and the global mapping method and apparatus of the present invention manipulator coordinate system, can reduce the calculation error of the mapping and improving the conversion efficiency.
[0045] In order to make it possible to understand the invention, the present invention will be apparent from the drawings in the embodiment of the present invention, and the technical solutions in the embodiments of the present invention will be described in understanding, and hereinafter, obviously, The described embodiments are merely the embodiments of the invention, and not all of the embodiments. Based on the embodiments of the present invention, those of ordinary skill in the art will belong to the scope of the present invention in the scope of the present invention without making creative labor premises.
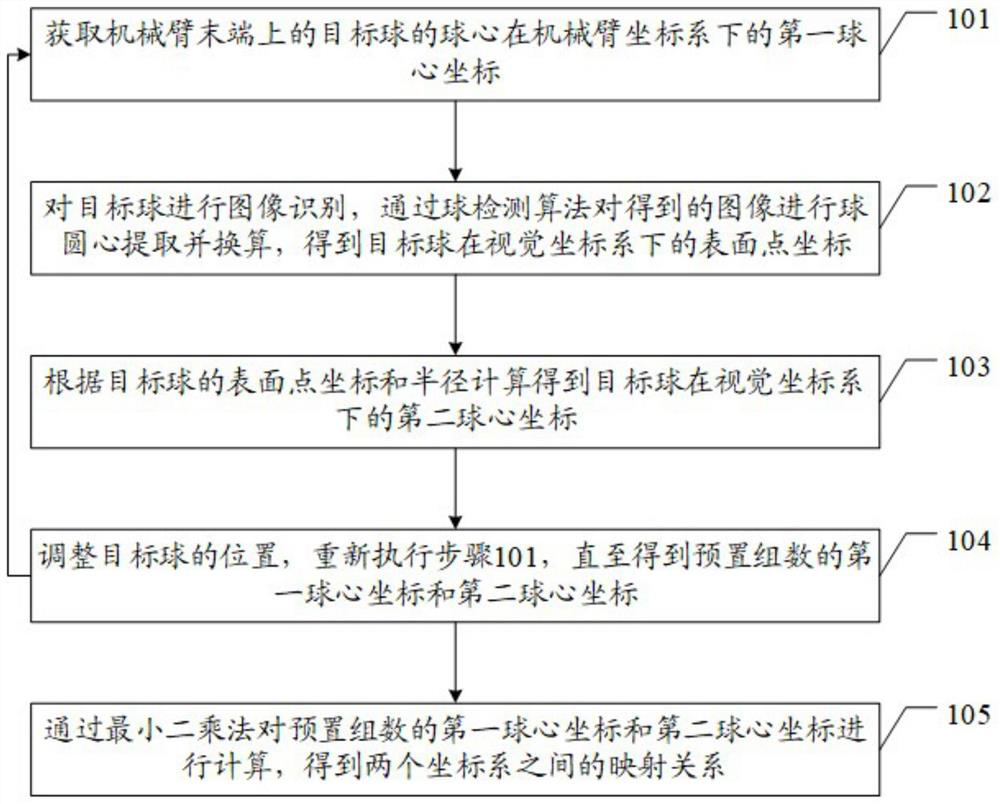
[0046] See figure 1 , An embodiment of a visual coordinate system and the global mapping method manipulator coordinate sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More