Turning type stair climbing robot with foldable swing arms
A technology for climbing stairs and robots, applied in the field of search and rescue, investigation, and exploration of robots, can solve the problems of inability to use portability, the swing arm cannot be folded, etc., and achieve the effect of increasing portability, reducing overall size, and reducing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
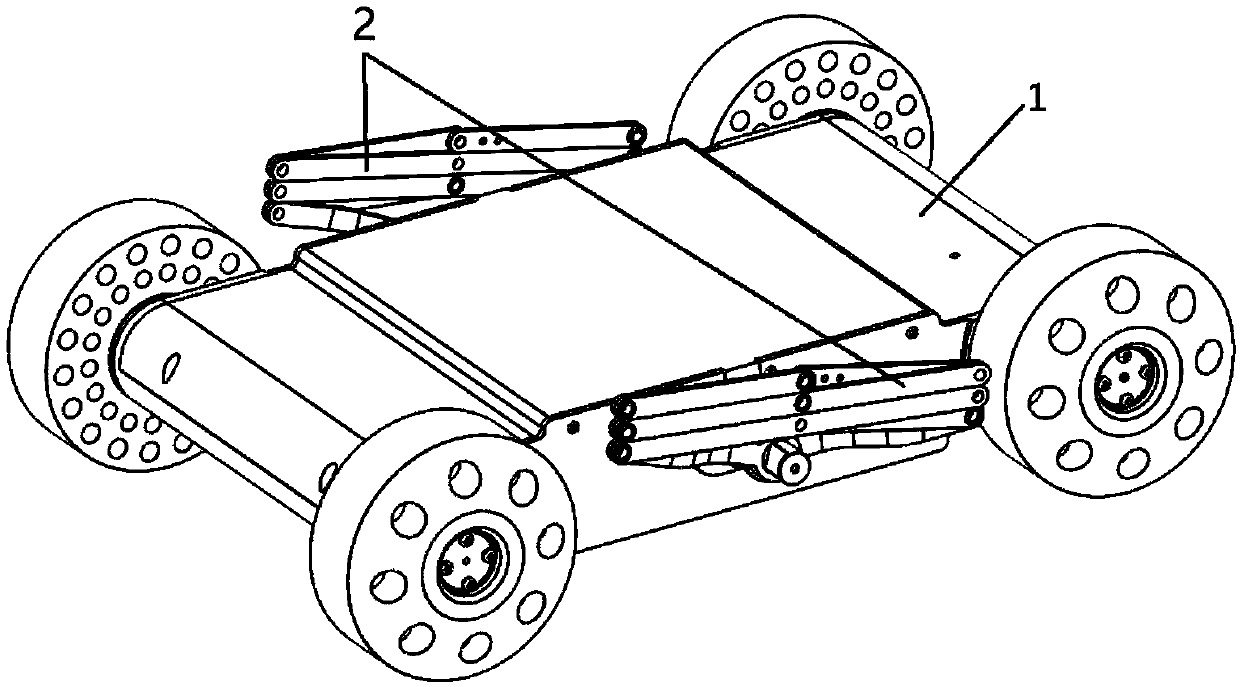
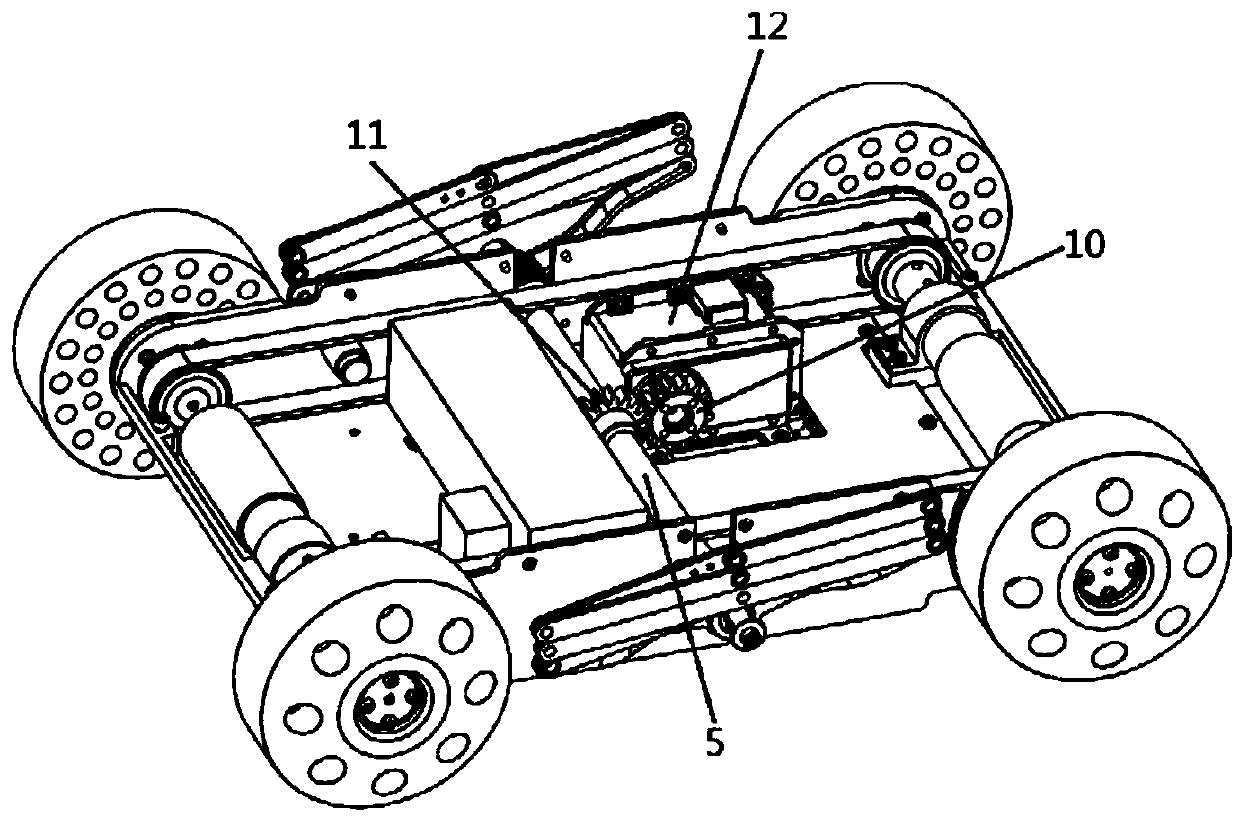
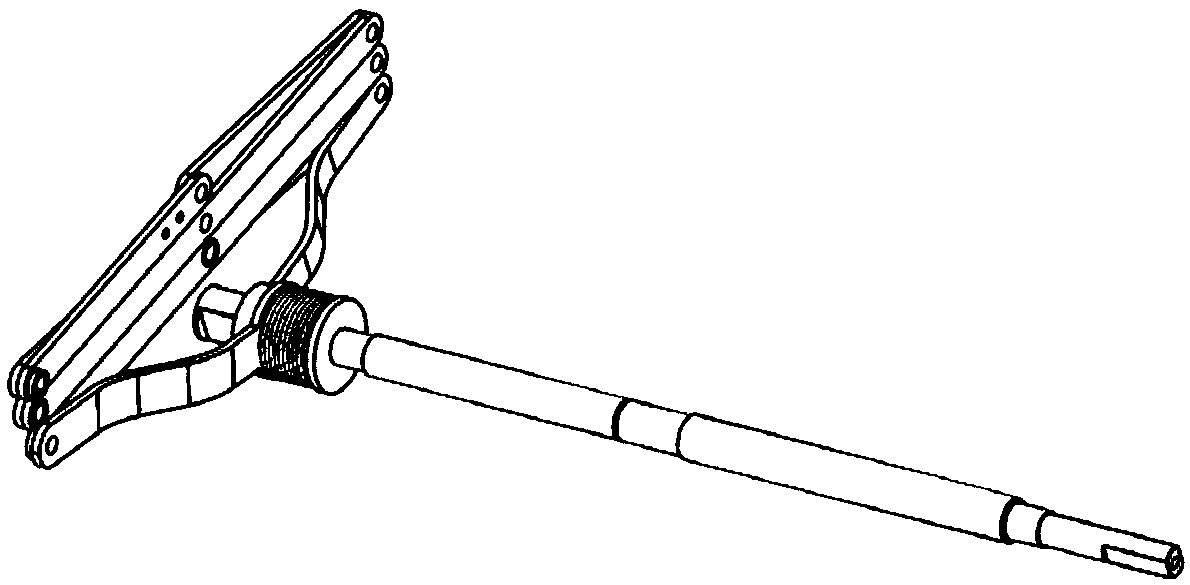
[0035] This embodiment provides a flipped stair-climbing robot with a foldable swing arm, see appendix figure 1 and 2 , including: wheeled mobile platform 1, swing arm 2, turning shaft 5, driving wheel 10, driven wheel 11 and turning motor 12;
[0036] The wheeled mobile platform 1 is the main structure of the robot, and four walking wheels are respectively installed at its four corners to realize the walking of the robot;
[0037] The turning motor 12 is installed in the wheeled mobile platform 1, and its output shaft is coaxially fixed with the driving wheel 10;
[0038] The turning shaft 5 is installed on the wheeled mobile platform 1, and its axis is parallel to the axis of the traveling wheel; the middle part of the turning shaft 5 is coaxially fixed with a driven wheel 11, and the driven wheel 11 meshes with the driving wheel 10; the turning sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com