

A fruit picking robot end effector
A technology for picking robots and end effectors, applied in picking machines, manipulators, harvesters, etc., can solve problems such as complex picking process, fruit damage, and low efficiency, and achieve improved picking efficiency, reduced vibration of fruit branches, and high transmission efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
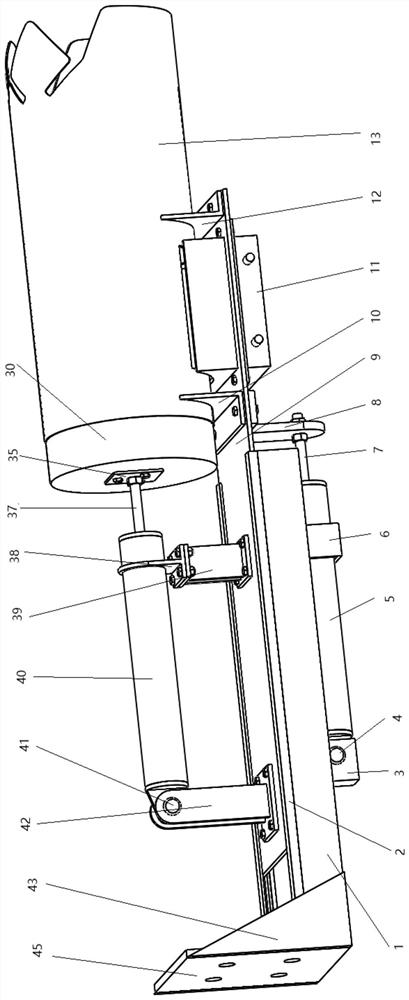
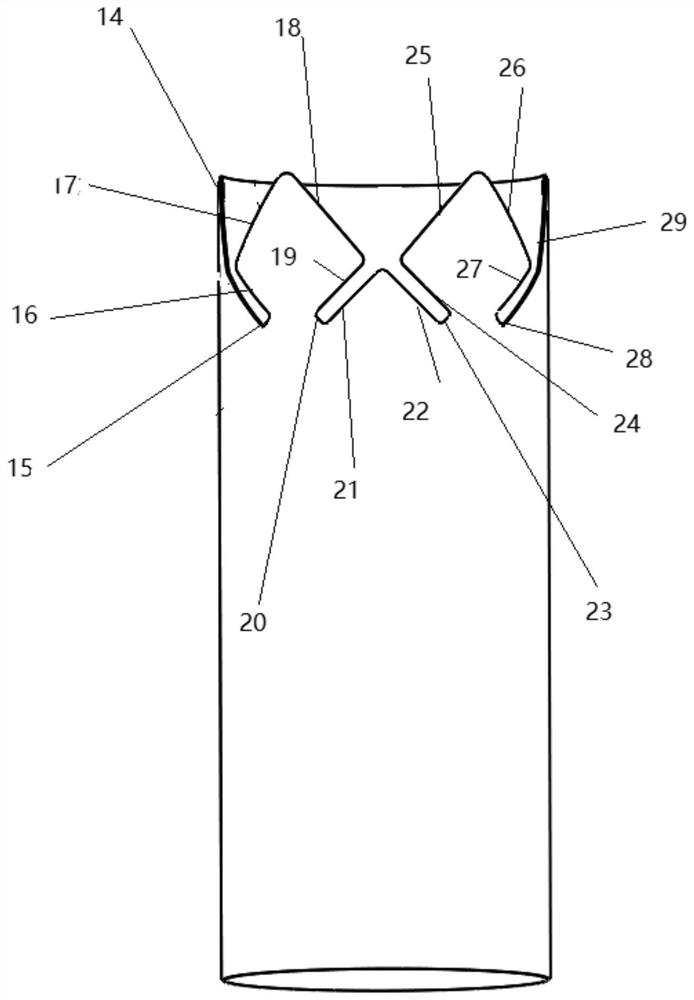
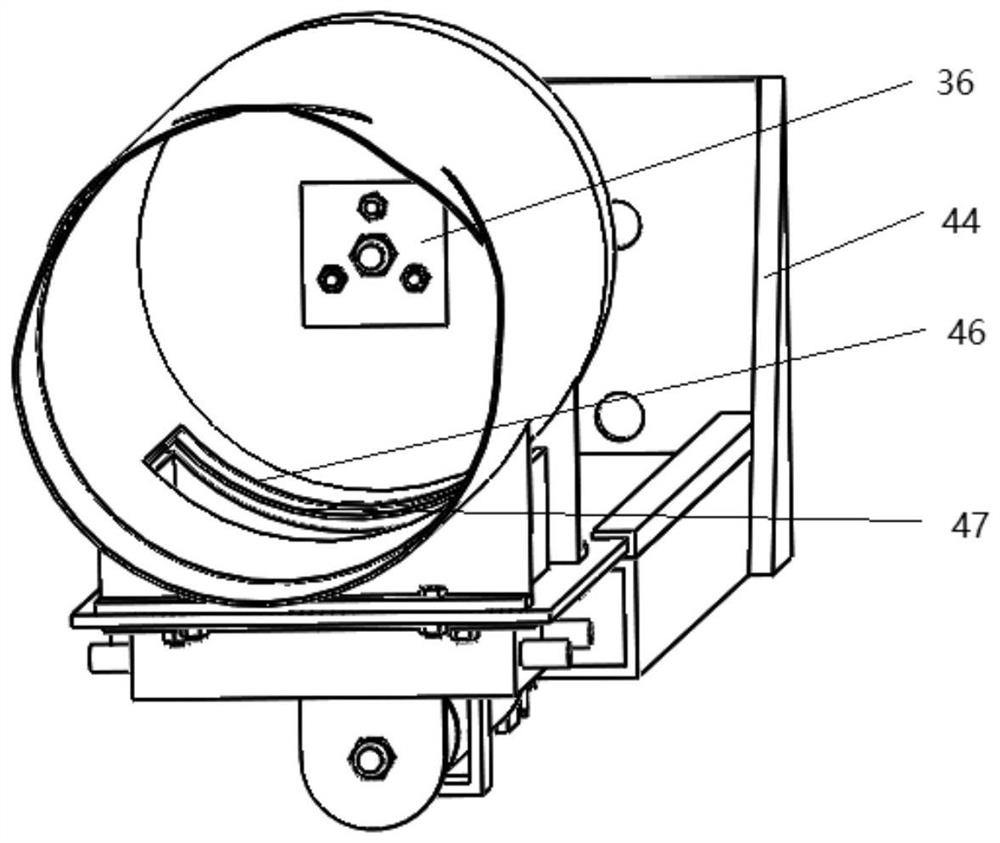
[0034] like Figure 1 to Figure 6 As shown, the end effector of a fruit picking robot according to the present invention includes a linear feed positioning assembly and a cylinder shear assembly, and the linear feed positioning assembly is equipped with a cylinder shear assembly, and the cylinder shear assembly The reciprocating linear motion can be performed on the linear feed positioning component, and the linear feed positioning component can be installed on the mechanical arm of the picking robot.
[0035] Further: the linear feed positioning assembly includes a base 1, a linear guide rail 2, a hydraulic cylinder fixed support 3, a first hydraulic cylinder 5, a hydraulic cylinder bracket 6, a movable bottom plate push piece 8 and a mobile bottom plate 9;
[0036] The movable bottom plate 9 is slidably installed on the base 1 through the li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More