Method, device, and system for controlling automated guided vehicle
A technology of automatic guided vehicles and control methods, which is applied to road network navigators and other directions, and can solve problems such as relying on manual settings and cumbersome
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
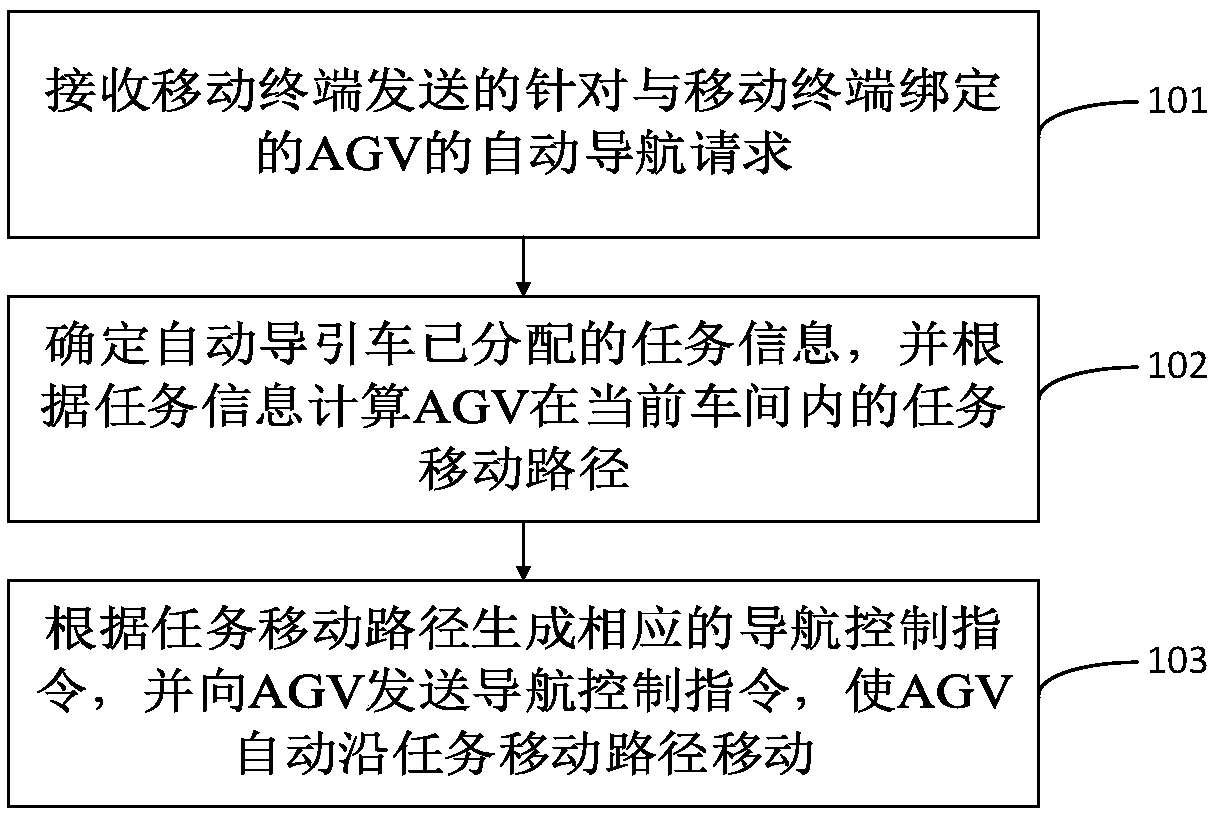
[0046] As an intelligent tool for transporting materials, automatic guided vehicles (AGV) have been applied to many industries, such as logistics, transportation, assembly workshops and manufacturing workshops, etc., which can realize point-to-point automatic access and handling operations, and realize refinement, information Minimize, shorten logistics time, reduce commodity loss, and reduce construction investment costs. At present, the working process of the AGV needs to be manually set by the staff. It is inconvenient to realize the handling and transportation by inputting the actions of the AGV at each node in the workshop. Therefore, this embodiment proposes an automatic guided vehicle control method , when using the mobile terminal to control the AGV, the automatic transportation or handling of the AGV can be realized by setting the server between the mobile terminal and the AGV. This method is applied to the server, such as figure 1 shown, including:
[0047] Step 101...
no. 2 example
[0070] This embodiment provides an automatic guided vehicle control device 300, such as Figure 5 shown, including:
[0071] The receiving device 301 is configured to receive the automatic navigation request sent by the mobile terminal for the automatic guided vehicle bound to the mobile terminal;
[0072] The path planning device 302 is used to determine the assigned task information of the automatic guided vehicle, and calculate the task movement path of the automatic guided vehicle in the current workshop according to the task information. The task information includes the starting task node and the end task node of the automatic guided vehicle. task node;
[0073] The navigation device 303 is used to generate corresponding navigation control instructions according to the task movement path, and send the navigation control instructions to the automatic guided vehicle, so that the automatic guided vehicle automatically moves from the start task node to the end task node acc...
no. 3 example
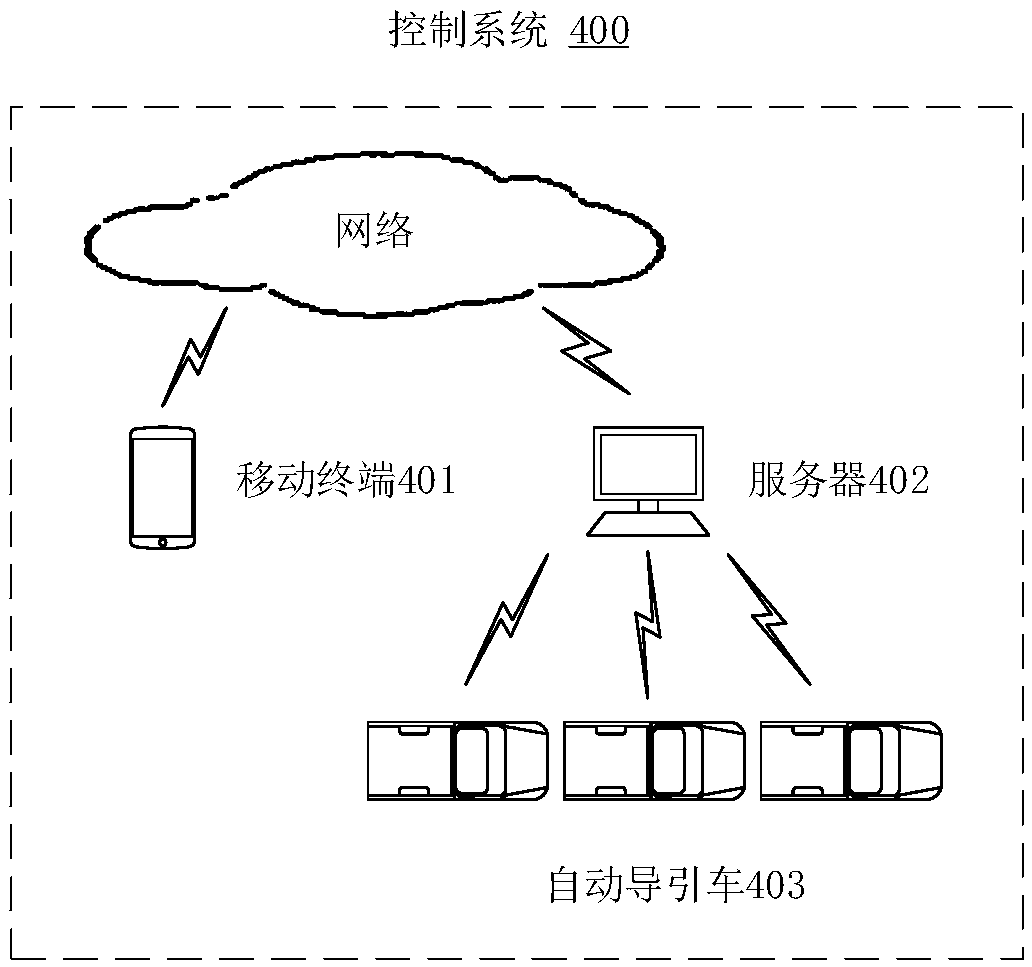
[0075] This embodiment provides a guided vehicle control system 400, such as figure 2 As shown, including a mobile terminal 401, a server 402 and at least one automatic guided vehicle 403, the mobile terminal 4 and at least one automatic guided vehicle are all communicated with the server;
[0076] The mobile terminal 401 is used to send an automatic navigation request for the automatic guided vehicle bound with the mobile terminal;
[0077] The server 402 is used to receive the automatic navigation request; and determine the assigned task information of the automatic guided vehicle, and calculate the task movement path of the automatic guided vehicle in the current workshop according to the task information, and the task information includes the initial task of the automatic guided vehicle Nodes and termination task nodes; and generate corresponding navigation control instructions according to the task movement path, and send navigation control instructions to the automatic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More