

A real-time planning method for UAV track based on dubins path and branch and bound
A branch-and-bound and unmanned aerial vehicle technology, applied in computer systems based on knowledge-based models, branch-and-bound, two-dimensional position/channel control, etc., can solve the complexity of UAV trajectory planning and the increase in storage consumption, It does not meet the flight characteristics of UAVs, poor engineering practicability, etc., to achieve the effect of increasing traversal speed, improving planning speed, and ensuring real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
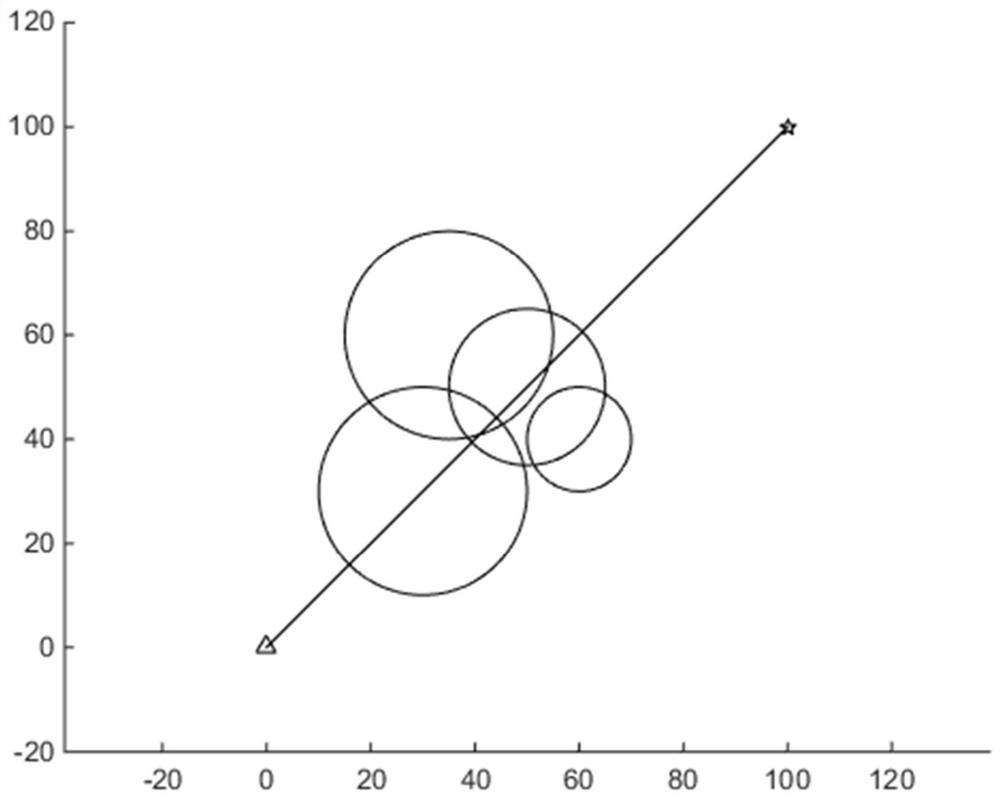
[0042]In order to illustrate the planning process of the present invention, an example is used below to further illustrate with the accompanying drawings. Since the complexity of using the present invention for trajectory planning has nothing to do with the absolute size of the task area, this example does not care about the absolute size of the distance, and the unit is 1. The trajectory planning issues to be dealt with areFigure 6 As shown, the point S marked with a small triangle in the lower left corner is the starting position of the drone, and the point G marked with a small five-pointed star in the upper right corner is the target position of the drone. There are only 3 obstacle circles in the map. Labeled as 1, 2, and 3 respectively.
[0043]First initialize the track search tree and set the root node n1, And agree that the current optimal flyable track length is infinite. At this time, the track search tree only contains the root node n1, And the traversal is not completed, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More