Paper foot grabbing mechanical arm device
A technology for grasping manipulators and manipulators, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as device falling off and finished product damage, and achieve the effect of ensuring safety and reliable grasping process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
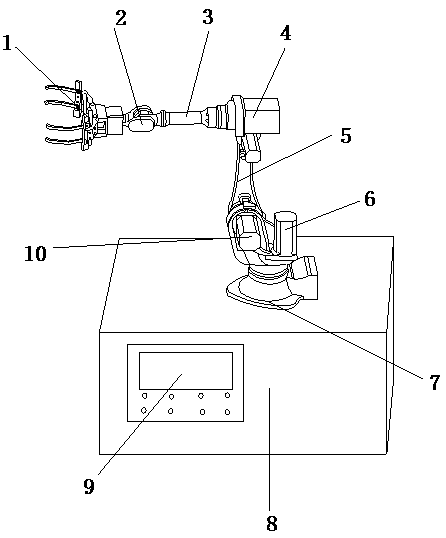
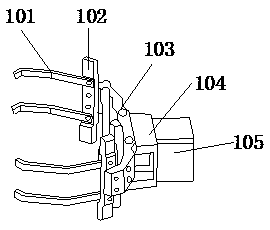
[0021] see figure 1 , figure 2 , the present invention provides a technical solution for a paper foot grabbing manipulator device: its structure includes: a new manipulator 1, a movable frame 2, a transmission shaft 3, a longitudinal motor 4, a support frame 5, a rotating motor 6, a rotating seat 7, and a device housing 8. Control cabinet 9, transverse motor 10, the rotating base 7 is located on the upper surface of the device housing 8 and is movably connected with the device housing 8, the rotating motor 6 is located on the right side of the upper surface of the rotating base 7 and embedded in the rotating base 7, the support frame 5 is located on the inner surface of the rotating base 7 and is matched with the rotating base 7, the longitudina...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap