

AUV obstacle avoidance method in dense obstacle environment
A technology of obstacles and obstacle information, which is applied in the direction of three-dimensional position/channel control, etc., to achieve the effect of low cost and high cost consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings.
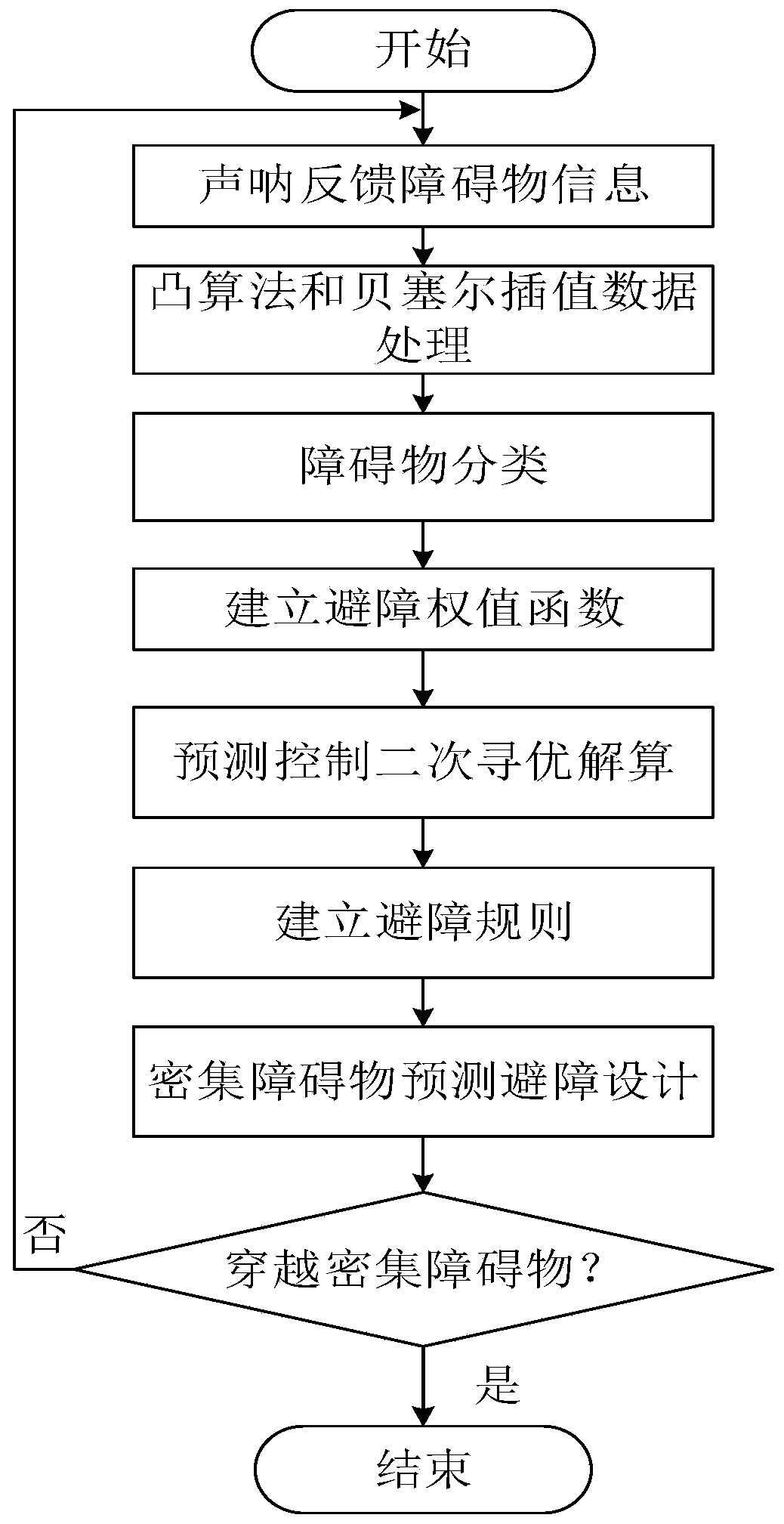
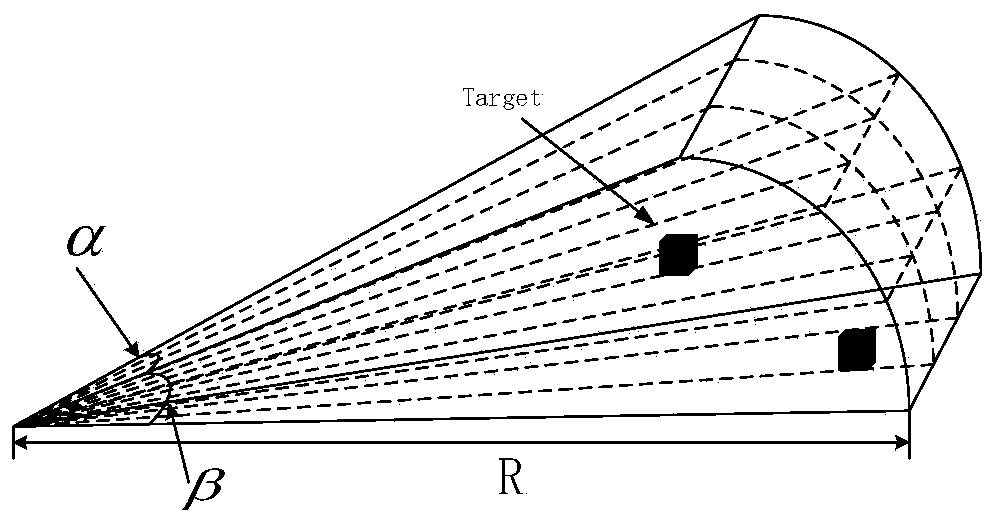
[0044] Step 1: Obtain AUV information and obstacle information detected by sonar;
[0045] Step 2: Classify the obstacles appearing in the sonar field of view by type;
[0046] Step 3: Perform data processing on the obstacle information detected by the sonar sensor;
[0047] Step 4: Predictive guidance AUV obstacle avoidance algorithm design;
[0048] Step 5: The principle of obstacle avoidance design for single convex obstacles;
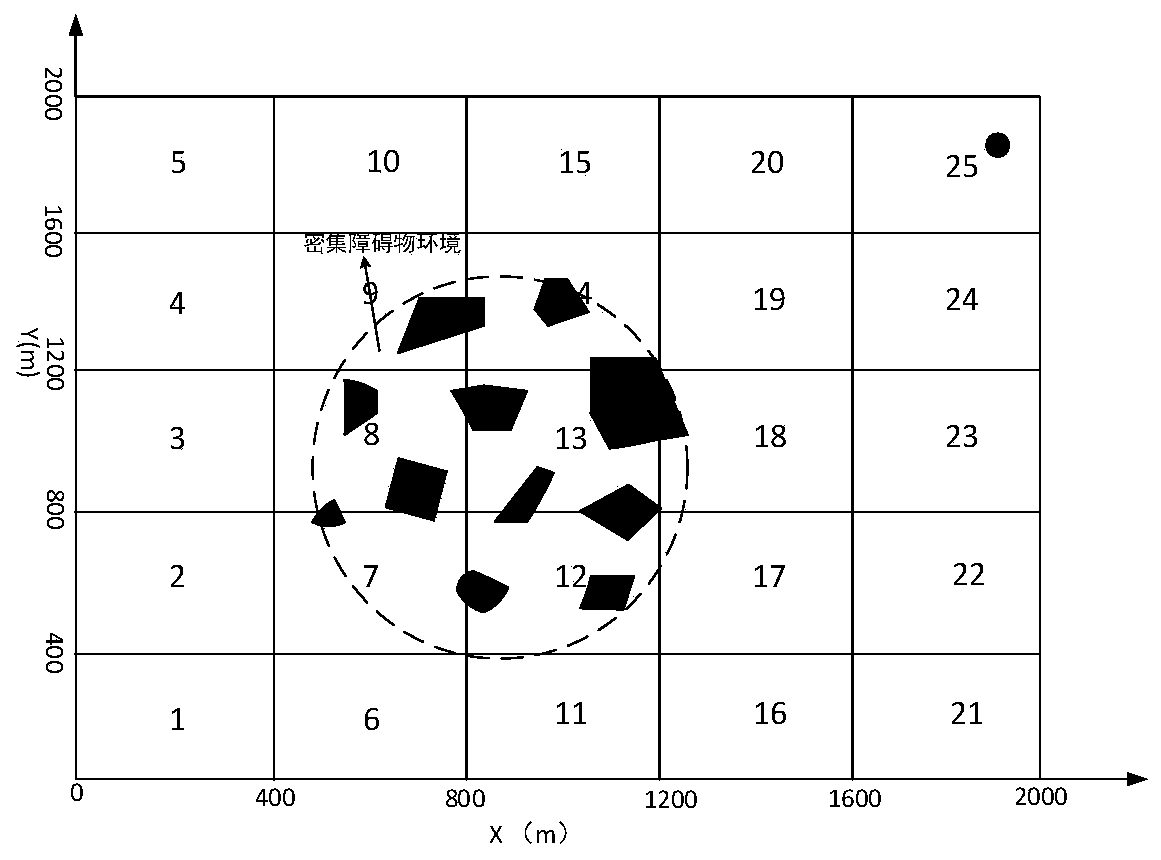
[0049] Step 6: According to the obstacle avoidance principle for a single obstacle in step 5, design the obstacle avoidance track in the dense obstacle environment.
[0050] The technical problem to be solved by the present invention is: in a dynamic and messy marine environment, in order to improve the advancement and safety of the AUV, it can be able to find a safe and efficient track to complete when facing a complex and dense obstacle e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More