

Tunnel inspection robot
A technology for inspection robots and tunnels, applied in manipulators, manufacturing tools, etc., can solve the problem of increased maintenance costs for inspection robots, and achieve the effects of reliable inspection results, stable walking, and guaranteed accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
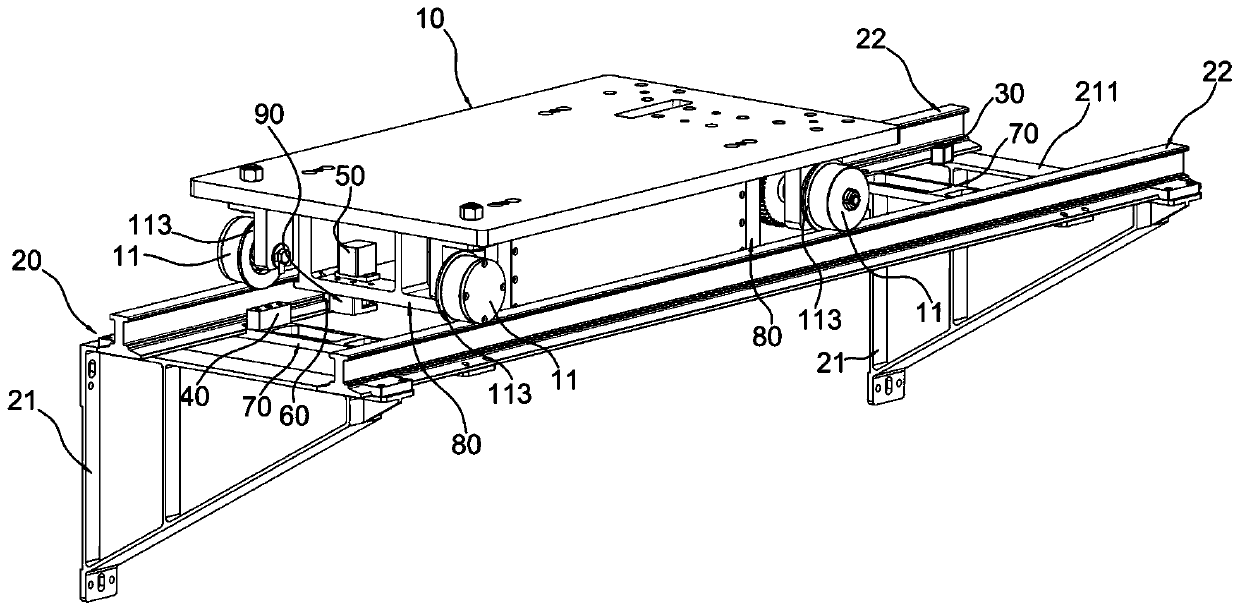
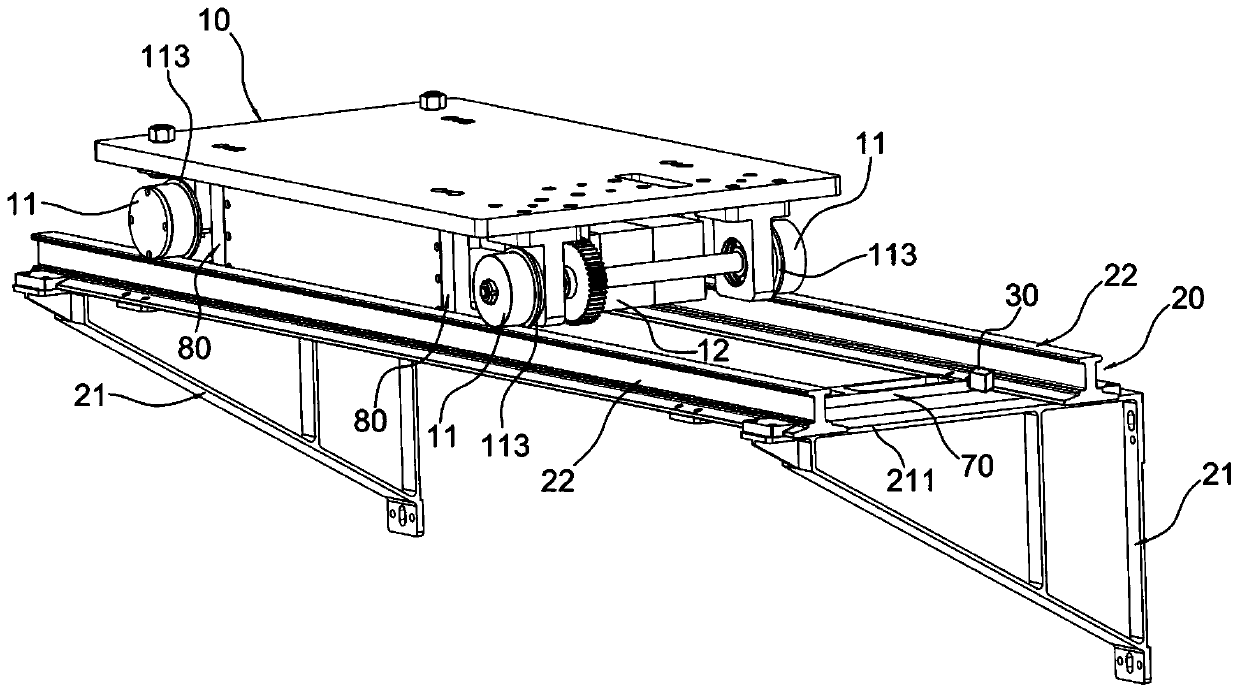
[0033] Example 1, such as Figure 1 to Figure 8 As shown, a tunnel inspection robot includes an inspection instrument, a walking trolley 10 and a mounting member 20 for installing the traveling trolley 10. The seat 21 and two parallel rails 22 overlapped on the top of the support 21, the track 22 is provided with a protrusion 221 on the upper part of the track and a protrusion 222 on the lower part of the track; several parallel connecting plates are connected between adjacent supports 21 70, the two ends of the connecting plate 70 are provided with ear plates 71, the top surface of the connecting plate 70 is higher than the top surface of the ear plate 71, the track 22 is arranged on the ear plate 71 close to the connecting plate 70; the walking trolley 10 is erected on the track 22 , the two ends of the walking trolley 10 are provided with a pair of support plates 80 stretching between the two tracks 22, and the support plate 80 both sides are provided with a support plate p...
Embodiment 2
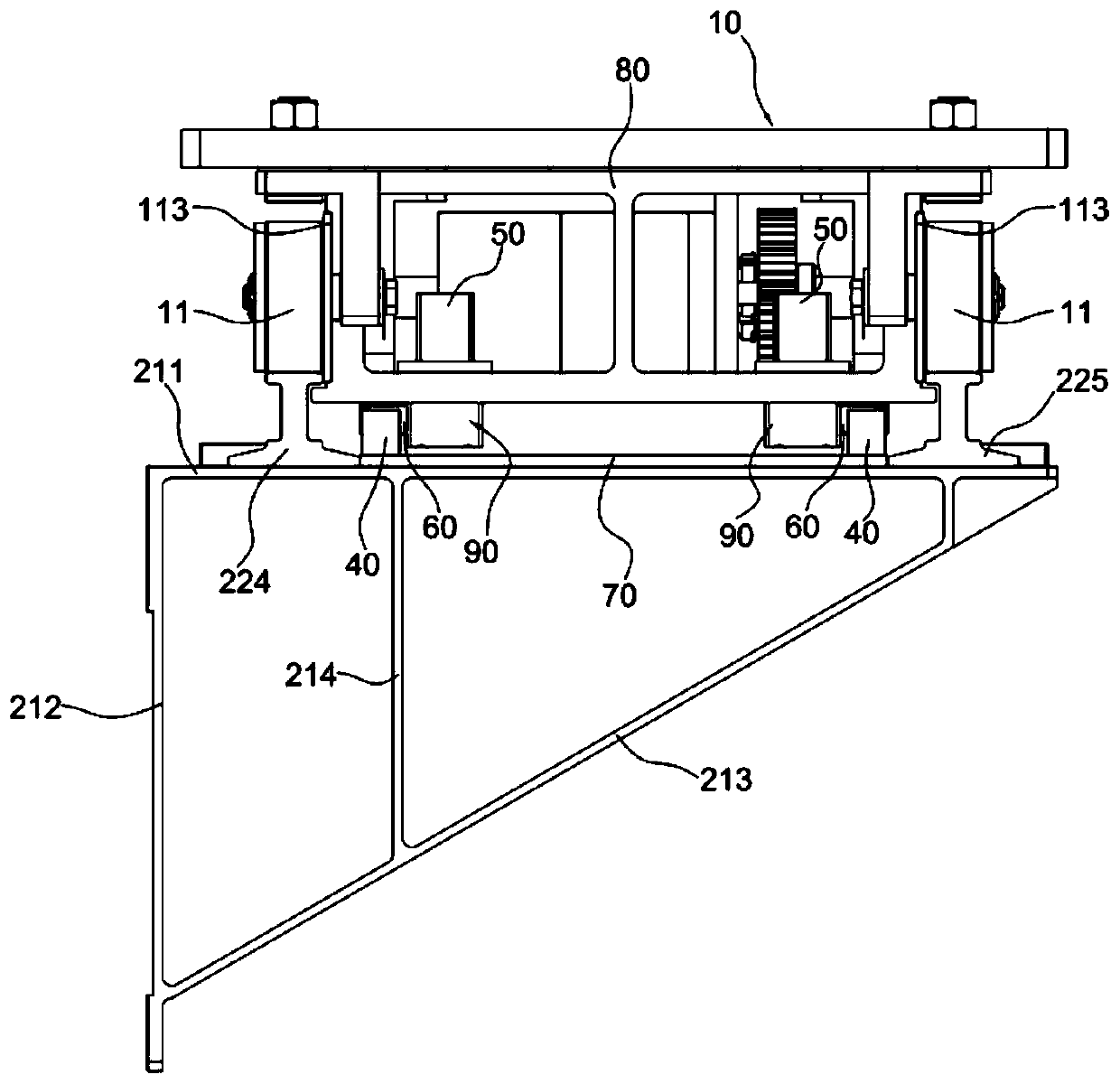
[0037] Embodiment 2, on the basis of Embodiment 1, the traveling trolley 10 is provided with a roller 11 , the roller 11 is movably arranged on the track 22 , and the roller 11 is driven by a servo motor 12 arranged on the traveling trolley 10 . One side of the roller 11 is provided with a roller positioning convex plate 113 whose lower end extends to the side of the upper protrusion 221 of the track, and the surface of the roller 11 is covered with a layer of nylon material. By setting the roller positioning convex plate 113, the position of the roller 11 can be limited, the roller 11 can be prevented from deviating from the track 22, and the traveling trolley 10 can be guaranteed to run smoothly. The surface of the roller 11 is covered with a nylon material layer, which can reduce the noise generated when the walking trolley 10 moves.
Embodiment 3
[0038] Embodiment 3, on the basis of Embodiment 1 or 2, the impact block 40 is arranged on the connecting plate 70 . The support plate 80 is provided with a support plate hollow opening 81, and the two-way rotating electromagnet 50 is arranged in the support plate hollow opening 81 of one of the support plates 80, and the rotating shaft of the two-way rotating electromagnet 50 passes through the support plate 80 and the rotation below the support plate 80 The stopper 60 is connected. The quantity of two-way rotating electromagnet 50 is two, and two two-way rotating electromagnets 50 are respectively arranged on support plate 80 two ends, and the rotating shafts of two two-way rotating electromagnets 50 are all connected with rotating stopper 60, and the quantity of collision block 40 is Two collision blocks 40 and rotating blocks 60 are correspondingly arranged at both ends of the connecting plate 70. When the traveling trolley 10 moves, the two collision blocks 40 collide wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More