

Autonomous anchor dropping control method and system of driverless ship
An unmanned, control method technology, applied in ship parts, ship construction, anchoring processing/binding, etc., can solve the problems of unable to achieve autonomous anchoring, not suitable for long-term navigation of large unmanned ships, etc., to improve the efficiency of anchoring, fast The effect of accurate anchoring and increased safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
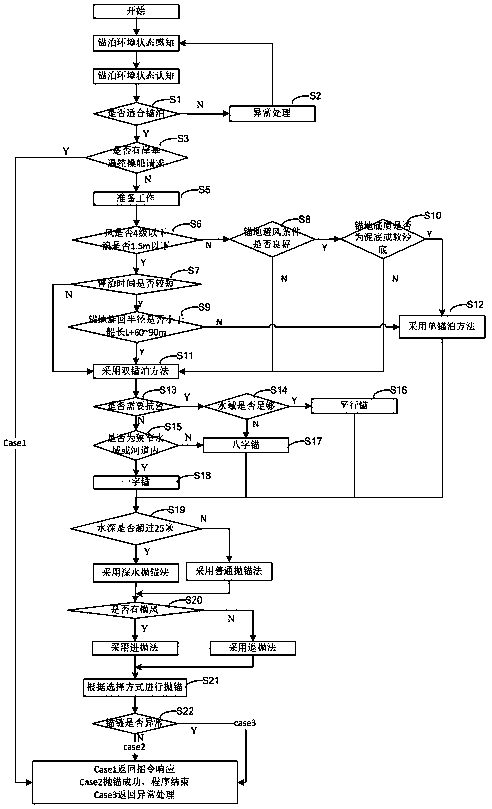
[0046] Specific embodiments of the present invention are described below in conjunction with accompanying drawing:
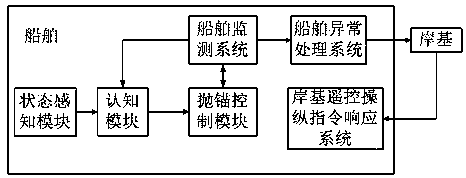
[0047] The unmanned ship in this embodiment includes a state perception module and a cognitive module.
[0048] The state perception module includes a shore-based command interaction module and a ship-borne sensor data acquisition module, which is used to collect and receive various data suitable for anchoring from shore-based and ship-borne equipment.
[0049] The cognitive module is integrated with an anchorage expert knowledge base, which can process and analyze the anchoring data collected by the state perception module, so as to realize real-time cognition of the state parameters of shipboard equipment and comprehensive cognition of the overall situation of anchoring. Among them, the anchorage expert knowledge base is formed based on the experience of the captain, the existing data files of the anchorage, and the investigation of the unknown anchorage.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More