

Finger rehabilitation robot with adduction and abduction functions
A rehabilitation robot and finger technology, applied in the direction of manipulators, manufacturing tools, passive exercise equipment, etc., can solve the problems of single degree of freedom, poor flexibility, etc., achieve low product cost, reduce production cost, and avoid secondary damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
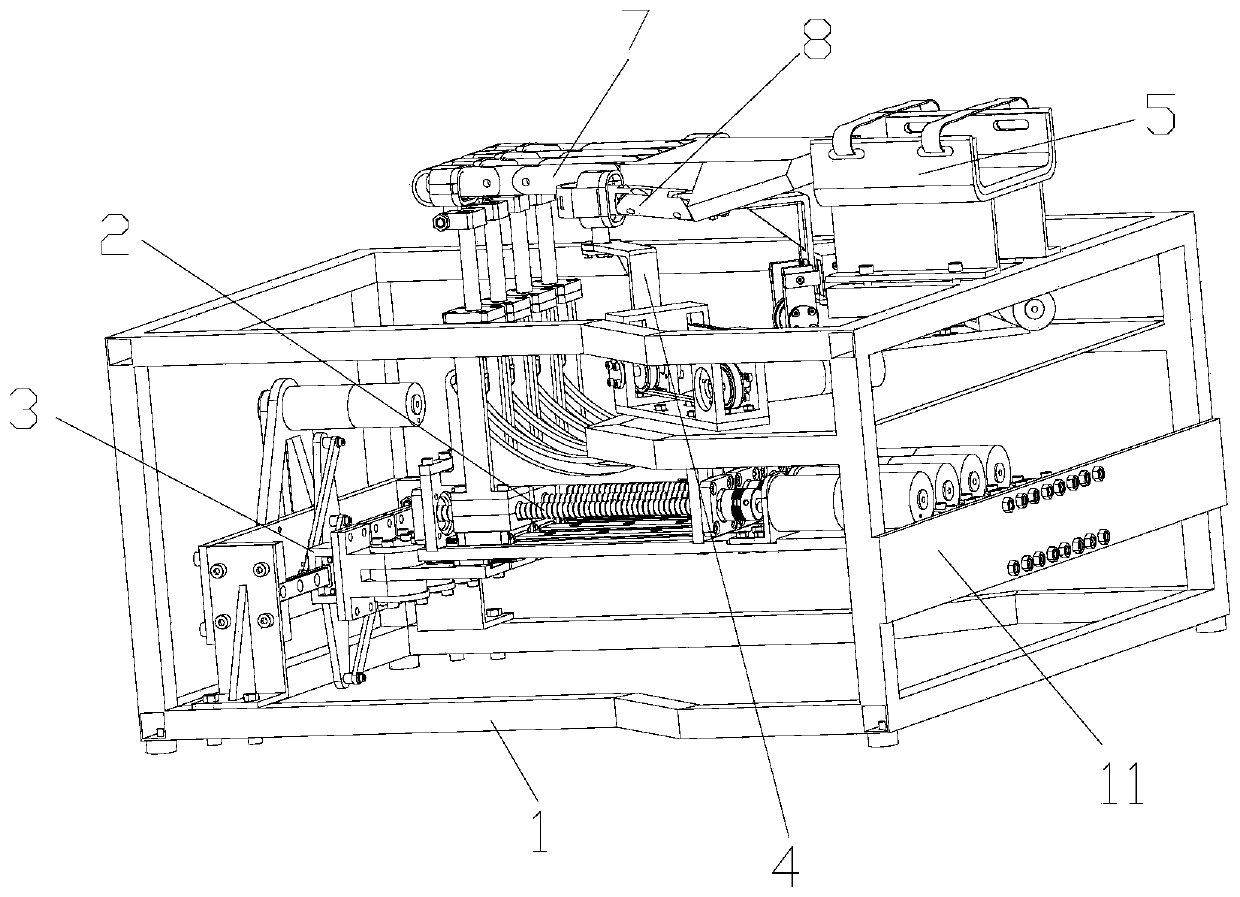
[0050] like figure 1 As shown, this embodiment provides a finger rehabilitation robot with adduction and abduction functions, including a frame 1, four four-finger flexion / extension movement assemblies 2, four-finger adduction / abduction movement assemblies 3 and two thumbs Motion assembly 4; two sides of the four four-finger flexion / extension motion assemblies 2 are respectively provided with a thumb motion assembly 4.
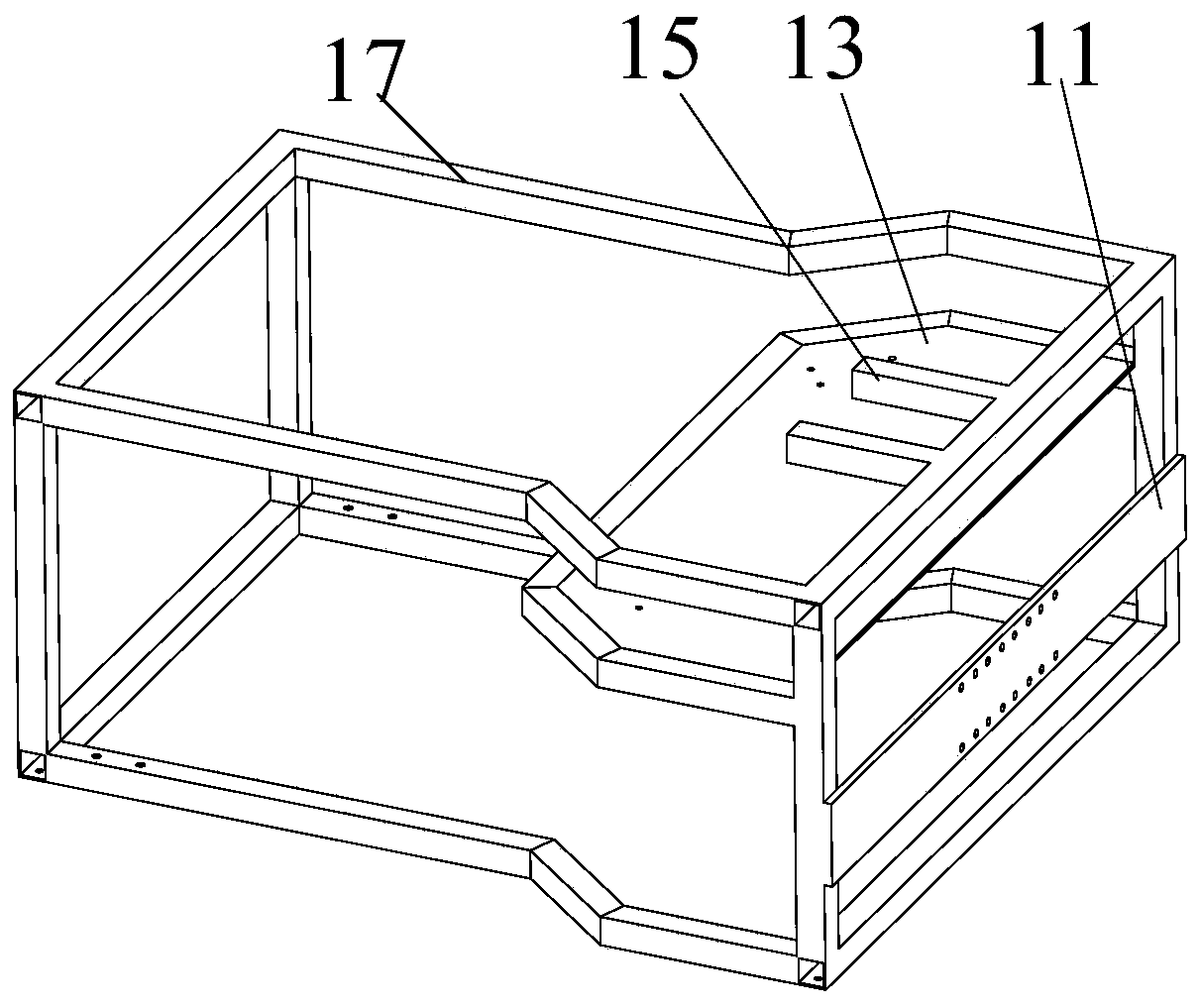
[0051] like Figure 1-14 As shown, the frame 1 includes a frame body 17, a front side plate 12, a rear side plate 11 and a thumb movement assembly mounting frame 13; the front side plate 12 is arranged on the front of the frame body 17, and the rear side plate 11 is arranged on the machine The rear portion of the frame body 17, the thumb motion assembly mounting frame 13 is arranged on the upper middle part in the frame body 17; one end of the four-finger flexion / extension motion assembly 2 is arranged on the rear side plate 11, and the four-finger adduction / ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More