

Six-axis mechanical hand
A six-axis manipulator and manipulator technology, applied in the field of manipulators, can solve problems such as limited rotation angles, and achieve the effects of high automation, improved practicability, and accurate grasping positions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
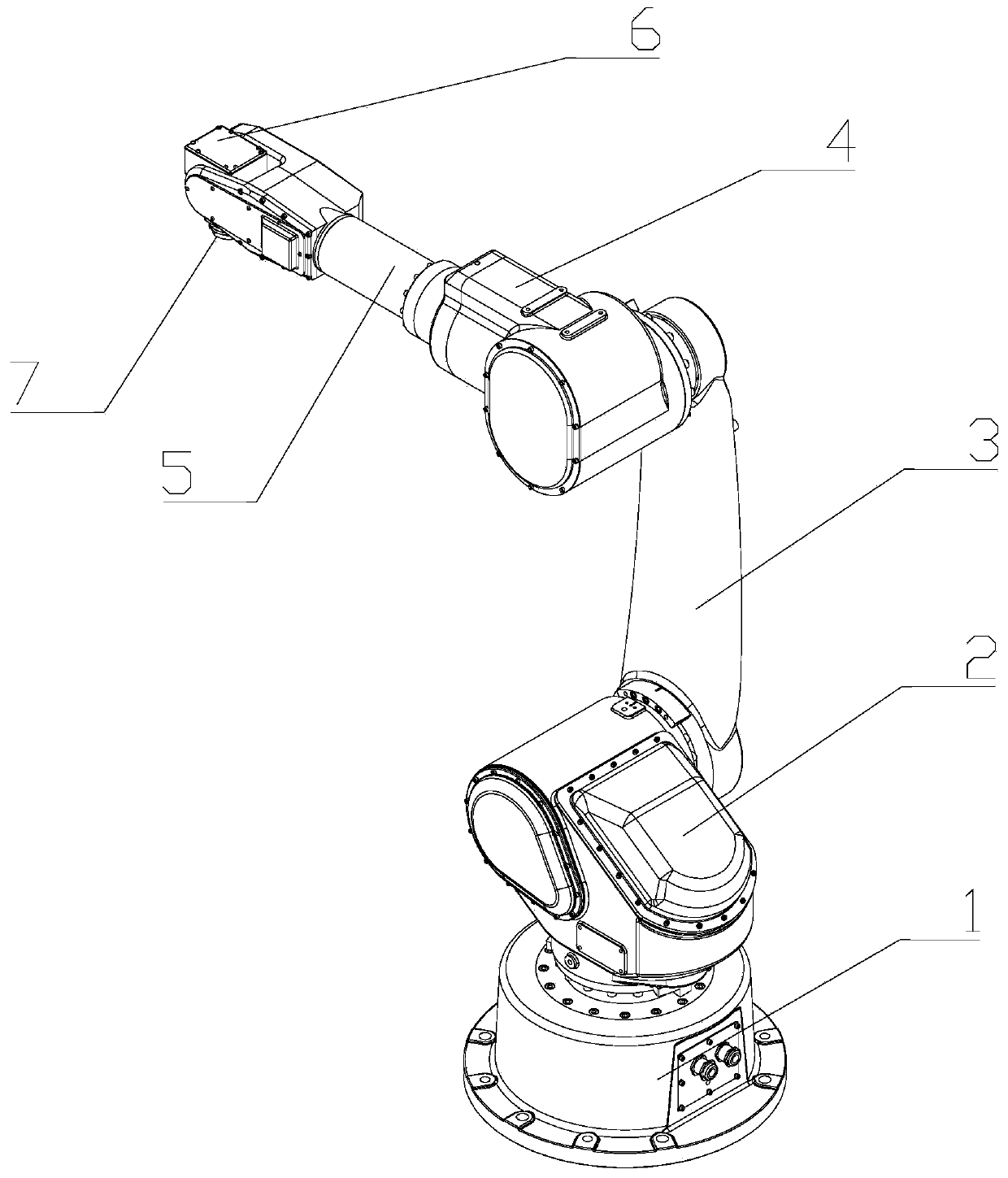
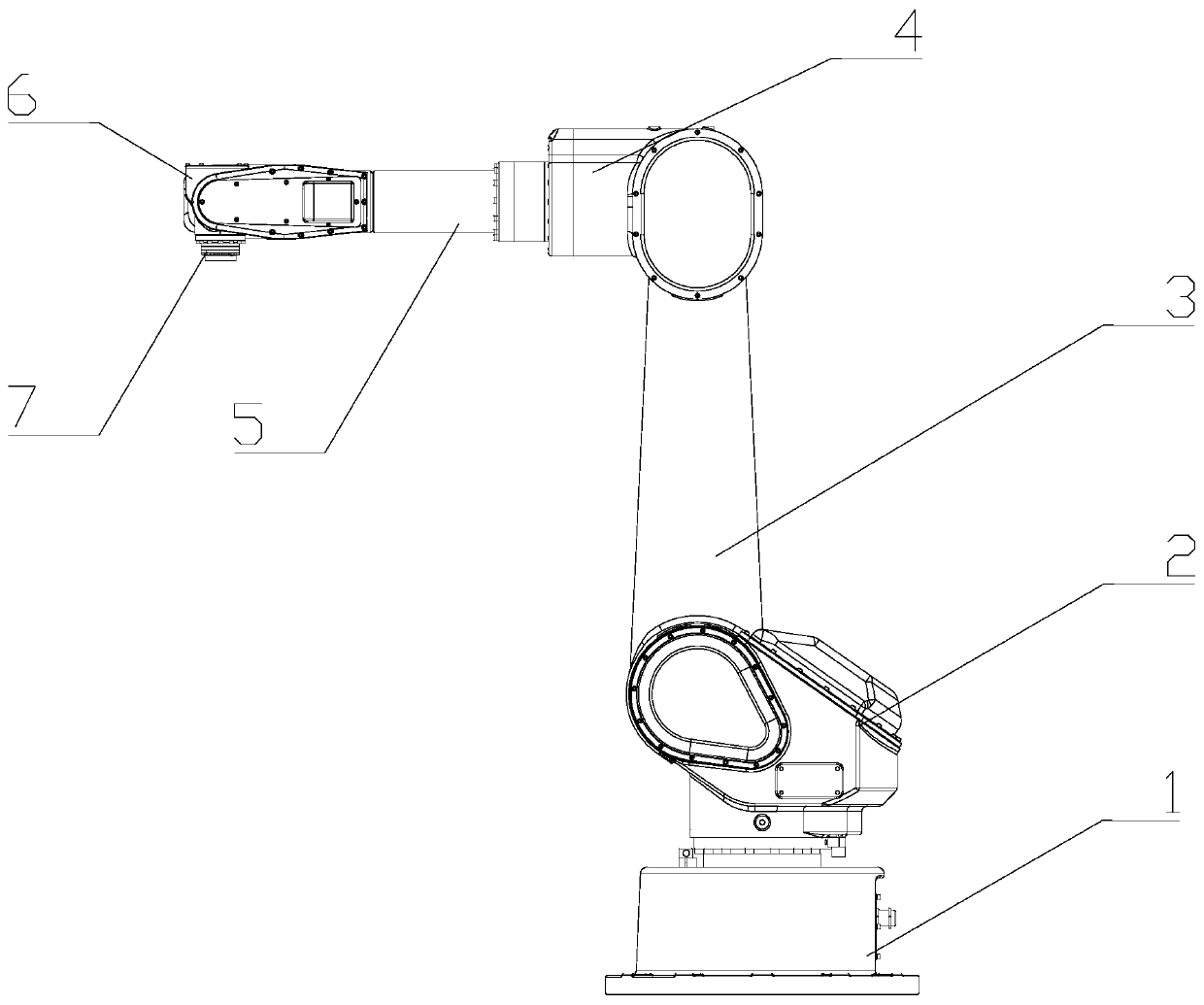
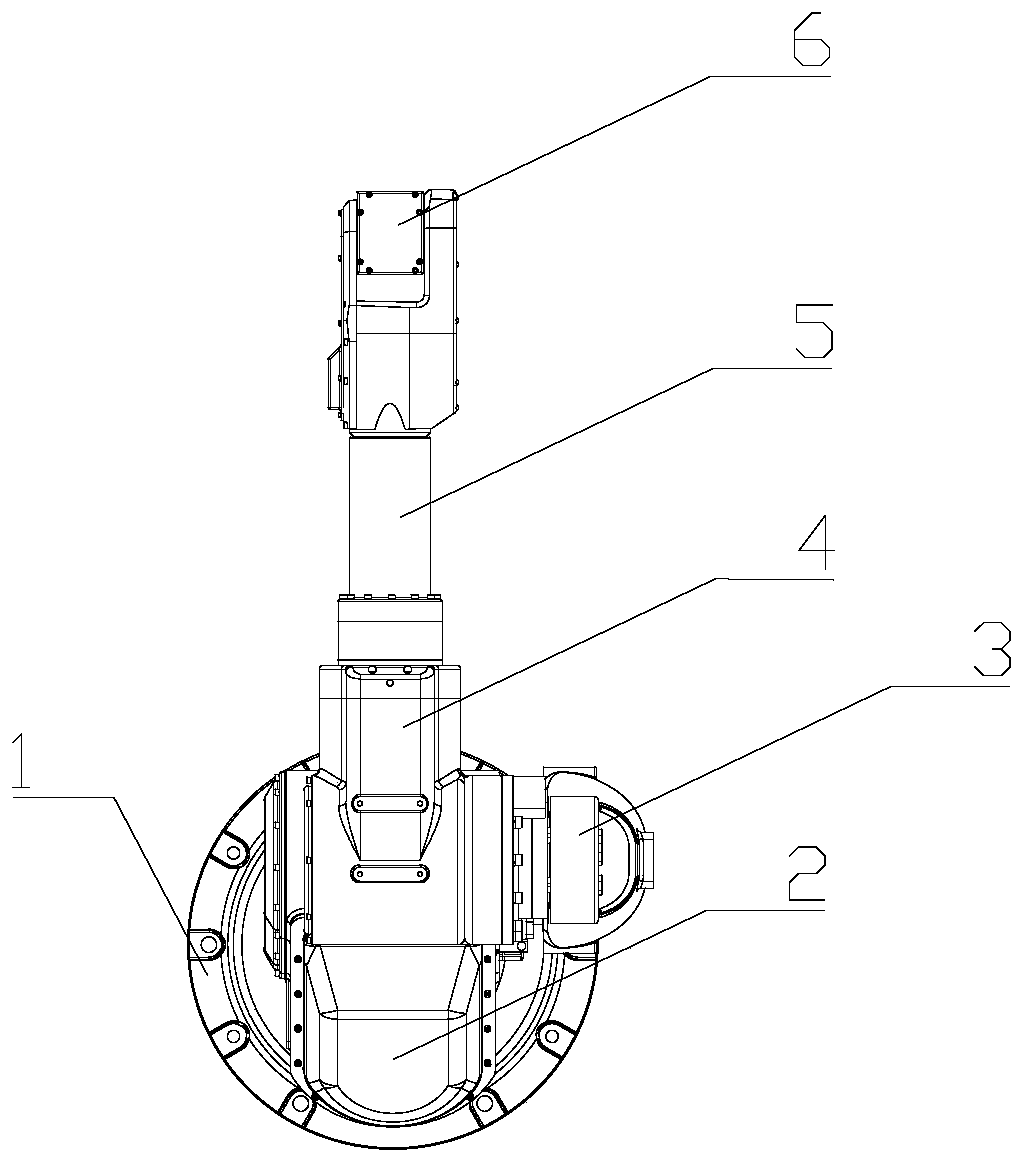
[0018] refer to Figure 1-3 , a six-axis manipulator proposed by the present invention, including: a base 1, a first manipulator 2, a second manipulator 3, a third manipulator 4, a fourth manipulator 5, a fifth manipulator 6 and a sixth manipulator 7. The bottom of the first mechanical arm 2 is rotatably connected to the top of the base 1, the second mechanical arm 3 is hinged to the first mechanical arm 2, the third mechanical arm 4 is hinged to the second mechanical arm 3, and the fourth mechanical arm 5 is hinged to the third mechanical arm. The arm 4 is rotationally connected, the fifth mechanical arm 6 is hinged to the fourth mechanical arm 5, the sixth mechanical arm 7 is rotationally connected to the fifth mechanical arm 6, the bottom 7 of the sixth mechanical arm is fixedly connected to the connecting piece 8, and one side of the connecting piece 8 Features a reversible clamp and a suction cup clamp on the other side.
[0019] During the specific implementation of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More