

A Neural Network-Based Identification Method for Dynamic Parameters of a 6-axis Robot
A technology of dynamic parameters and neural network, which is applied in the field of dynamic parameter identification of series industrial robots and 6-axis robots, can solve problems such as difficult control of industrial robots and low accuracy of dynamic parameter estimation, and achieve high-speed search for optimal solutions. , avoid local optimum, suppress the effect of random interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings of the description.
[0043] Select a suitable 6-axis robot, and obtain the robot's D-H parameters and other information.
[0044] D-H parameters
[0045] alpha1=pi / 2; a1=160; d1=0; theta1=q1; init_theta1=0
[0046] alpha2=0; a2=575; d2=0; theta2=q2; init_theta2=pi / 2
[0047] alpha3=pi / 2; a3=130; d3=644; theta3=q3; init_theta3=0
[0048] alpha4=-pi / 2; a4=0; d4=0; theta4=q4; init_theta4=0
[0049]alpha5=pi / 2; a5=0; d5=0; theta5=q5; init_theta5=-pi / 2
[0050] alpha6=0; a6=0; d6=109.5; theta6=q6; init_theta6=pi / 2
[0051] The present invention adopts following steps:
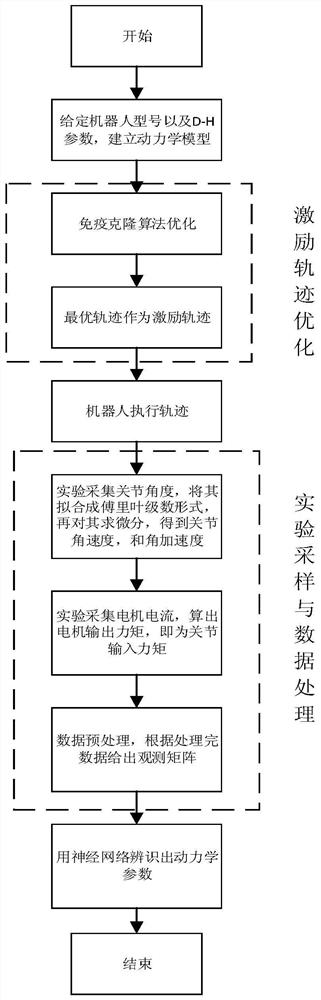
[0052] A method for identifying dynamic parameters of a 6-axis robot based on a neural network mainly includes the following steps:
[0053] In the first step of dynamic modeling, the D-H link coordinate system of the 6-axis robot is established, and its dynamic equation is con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More