Check patentability & draft patents in minutes with Patsnap Eureka AI!
Model-free control method of miso different factor compact scheme with parameter self-tuning
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A technology of parameter self-tuning and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc. The effect of applicability, good stability and high control precision
Active Publication Date: 2021-01-05
ZHEJIANG UNIV
View PDF6 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
When the existing MISO compact-form model-free control method with the same factor is applied to complex objects such as strongly nonlinear MISO systems, it is often difficult to achieve ideal control effects due to the different characteristics of the control channels, which restricts the MISO compact-form model-free control method. Promote application
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
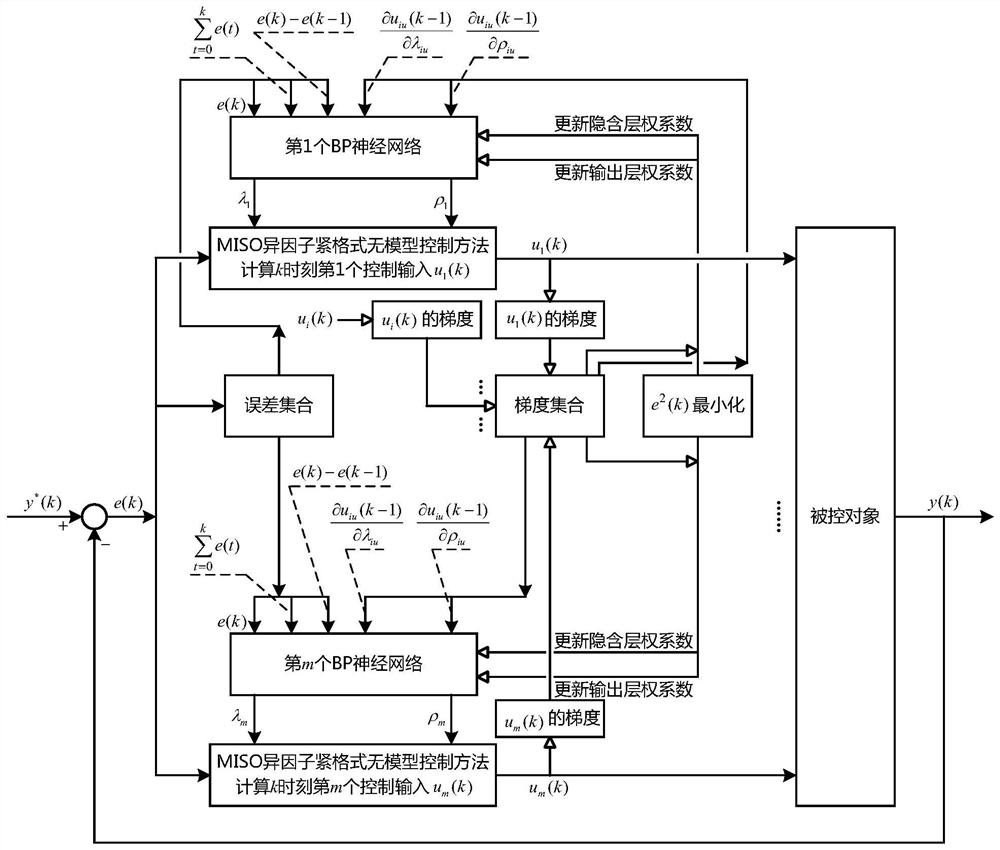
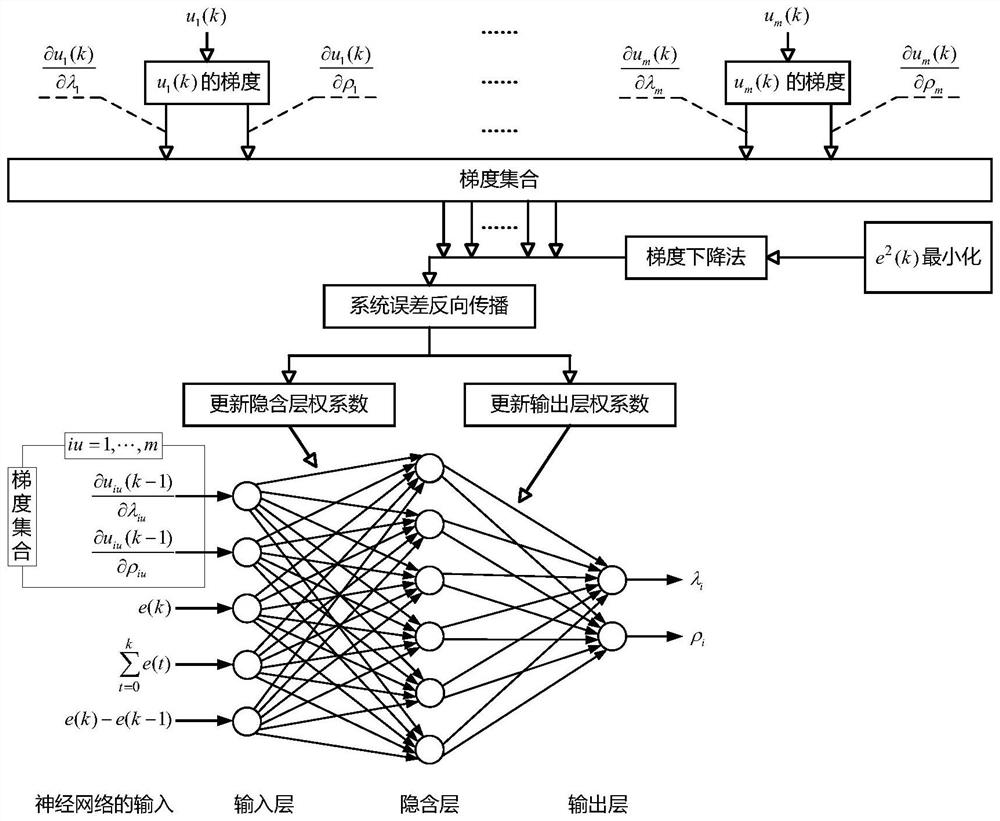
[0041] figure 1 The principle block diagram of the present invention is given. For a MISO system with m control inputs (m is a positive integer greater than 1), the MISO differential factor compact scheme model-free control method is used for control. For the ith control input u i (k)(i=1,...,m), the MISO heterogeneous compact form model-free control method is used to calculate u i The parameters of the mathematical formula of (k) include the penalty factor λ i , step factor ρ i ; select u i The parameter to be tuned in the mathematical formula of (k), which is u i (k) part or all of the parameters of the mathematical formula, including the penalty factor λ i , step factor ρ i any one or combination of any of the figure 1 In the schematic diagram, all control inputs u i (k) The parameter to be adjusted in the mathematical formula of (...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a parameter self-tuning MISO (Multiple Input and Single Output) different-factor tight-format model-free control method. In view of the limitation of the existing MISO tight-format model-free control method adopting the same factor structure, that is, the limitation of only adopting penalty factors with the same value and step-size factors with the same value for differentcontrol inputs in a control input vector at a k moment, an MISO tight-format model-free control method by adopting a different factor structure is provided, penalty factors with different values and / or step-size factors with different values can be adopted for different control inputs in the control input vector at the k moment, and the control problem of different characteristics of control channels existing in a complex object such as a strong nonlinear MISO system can be solved. A parameter self-tuning method is also provided to effectively overcome the problem that penalty factors and step-size factors need to consume time and labor for tuning. Compared with the existing control method, the method of the invention is higher in control accuracy, better in stability and wider in applicability.
Description
technical field [0001] The invention belongs to the field of automatic control, in particular to a parameter self-tuning MISO different factor compact format model-free control method. Background technique [0002] Controlled objects in oil refining, petrochemical, chemical, pharmaceutical, food, papermaking, water treatment, thermal power, metallurgy, cement, rubber, machinery, electrical and other industries, including reactors, distillation towers, machines, equipment, devices, production lines, workshops , factories, many of which are controlled by MISO (Multiple Input and Single Output) systems. Realizing high-precision, high-stability, and high-applicability control of the MISO system is of great significance to industrial energy saving, consumption reduction, quality improvement and efficiency increase. However, the control problems of MISO systems, especially the control problems of strongly nonlinear MISO systems, have always been a major challenge in the field of ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.

 Login to View More
Login to View More  Login to View More
Login to View More