

Rapid ground moving robot with bionic bounce capability
A fast-moving, bionic projectile technology, applied in the field of robotics, can solve the problem that the bouncing robot cannot accurately adjust the take-off position and take-off direction on the ground, and achieve the effect of small mass, high strength and improved movement efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
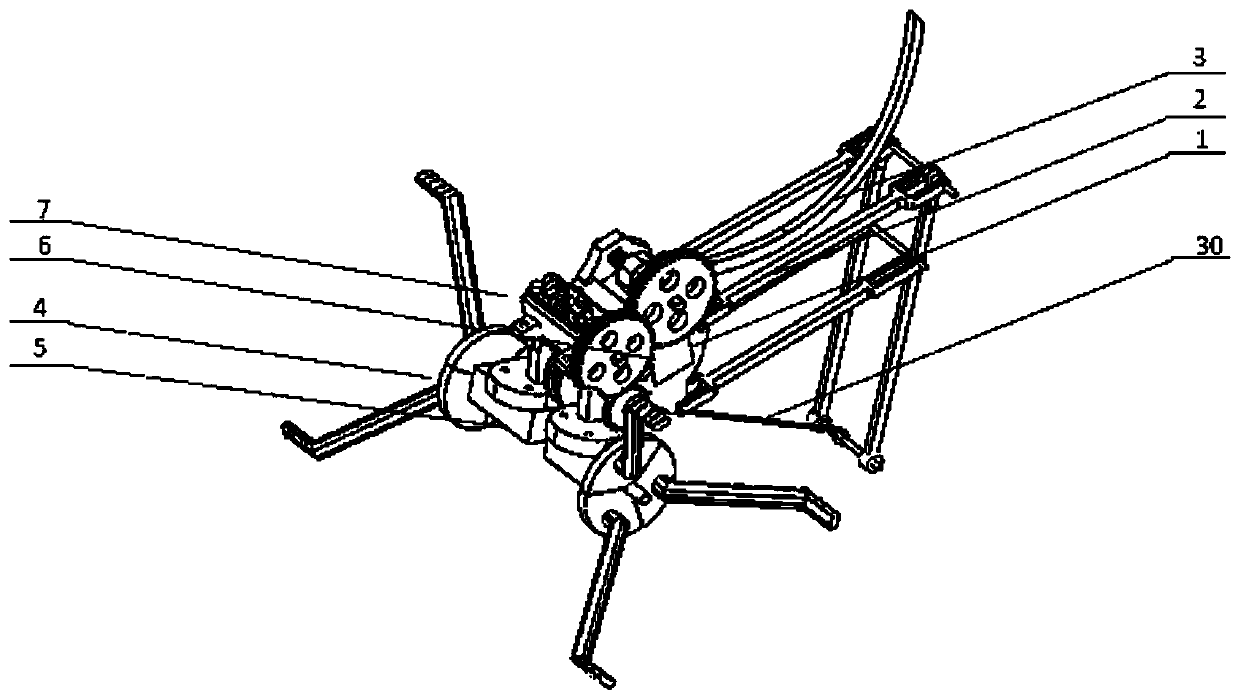
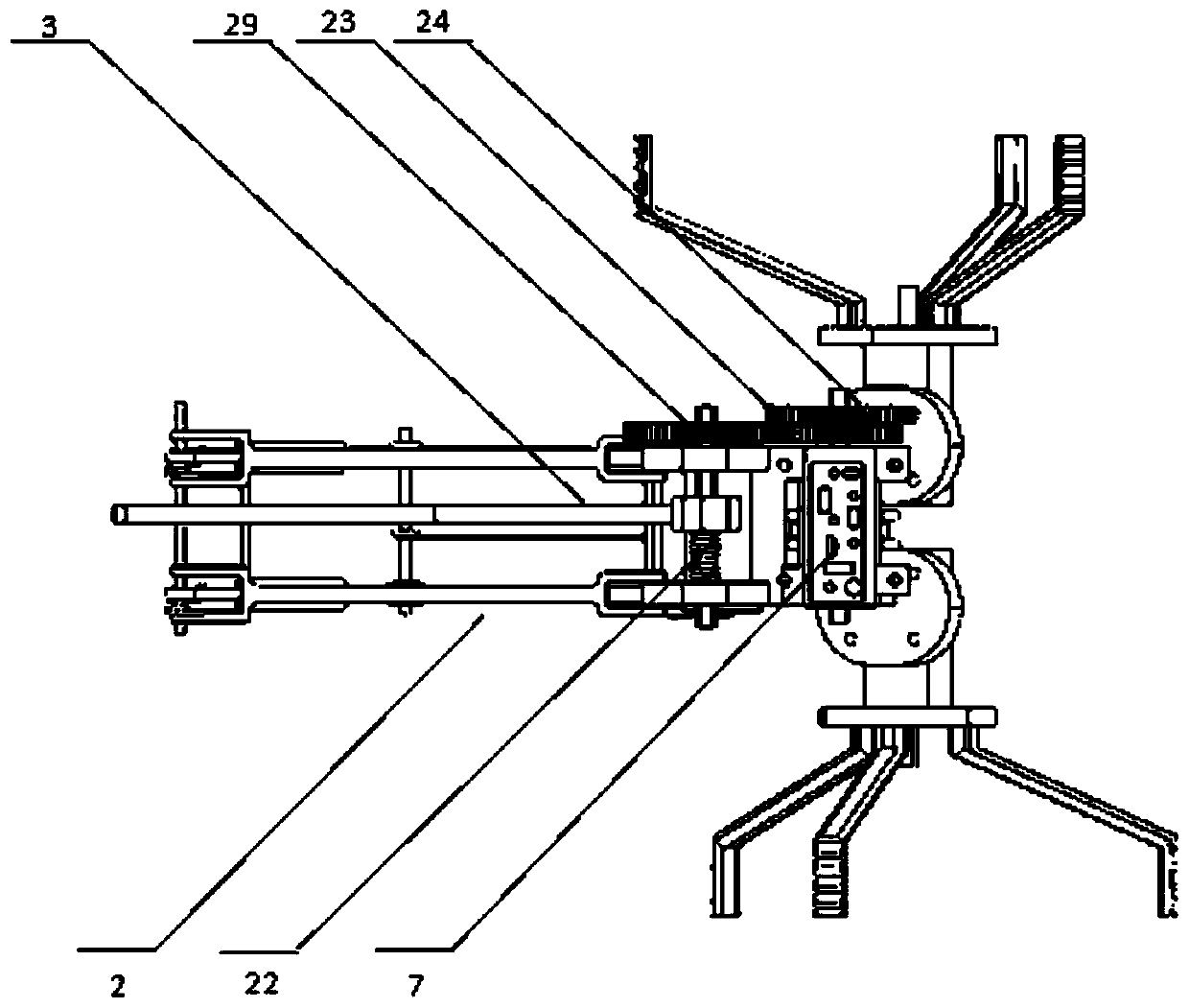
[0027] see figure 1 — Figure 12 , the present invention is a crawling and bouncing robot, which is mainly characterized in that it comprises 1-body, 2-bouncing mechanism, 3-resetting lever, 4-crawling mechanism, 5-driving mechanism, 6-power supply and 7-control system.
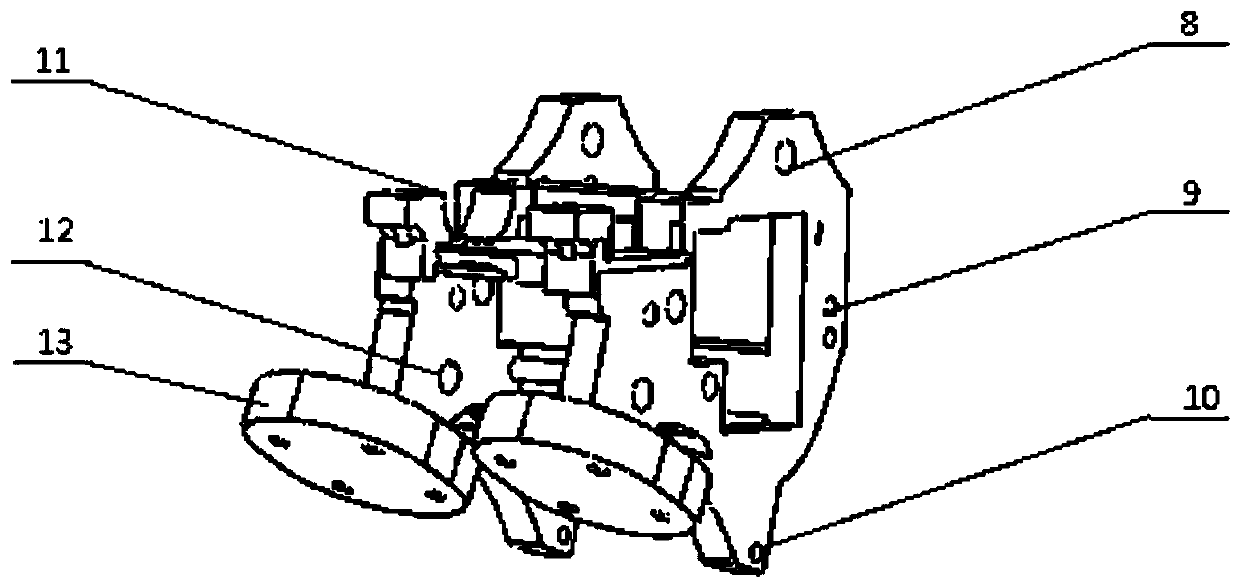
[0028] Such as image 3 As shown in , the 1-body includes: reset shaft hole 8, upper bracket installation hole 9, lower bracket installation hole 10, these three holes surround the power supply; motor slot 11, winding shaft hole 12, motor attachment 13 , the deceleration motor 5 is installed on the motor slot 11 and the two motor attachments 13 respectively, and is fixed with screws; on it is the control system 7, which is composed of a three-connected single-chip microcomputer, which controls the bouncing motor and the following two crawling motors respectively. The motor has a motor slot 11 and a geared motor 5 on it, which is mainly responsible for the bouncing motion. The two geared motors 5 at the moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More