

Method and device for avoiding kinematic singularity points in robot motion planning
A technology of robot motion and kinematics, applied in the field of devices that avoid kinematic singularities, can solve problems such as danger, performance degradation, and practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be further described in detail below in conjunction with specific embodiments.
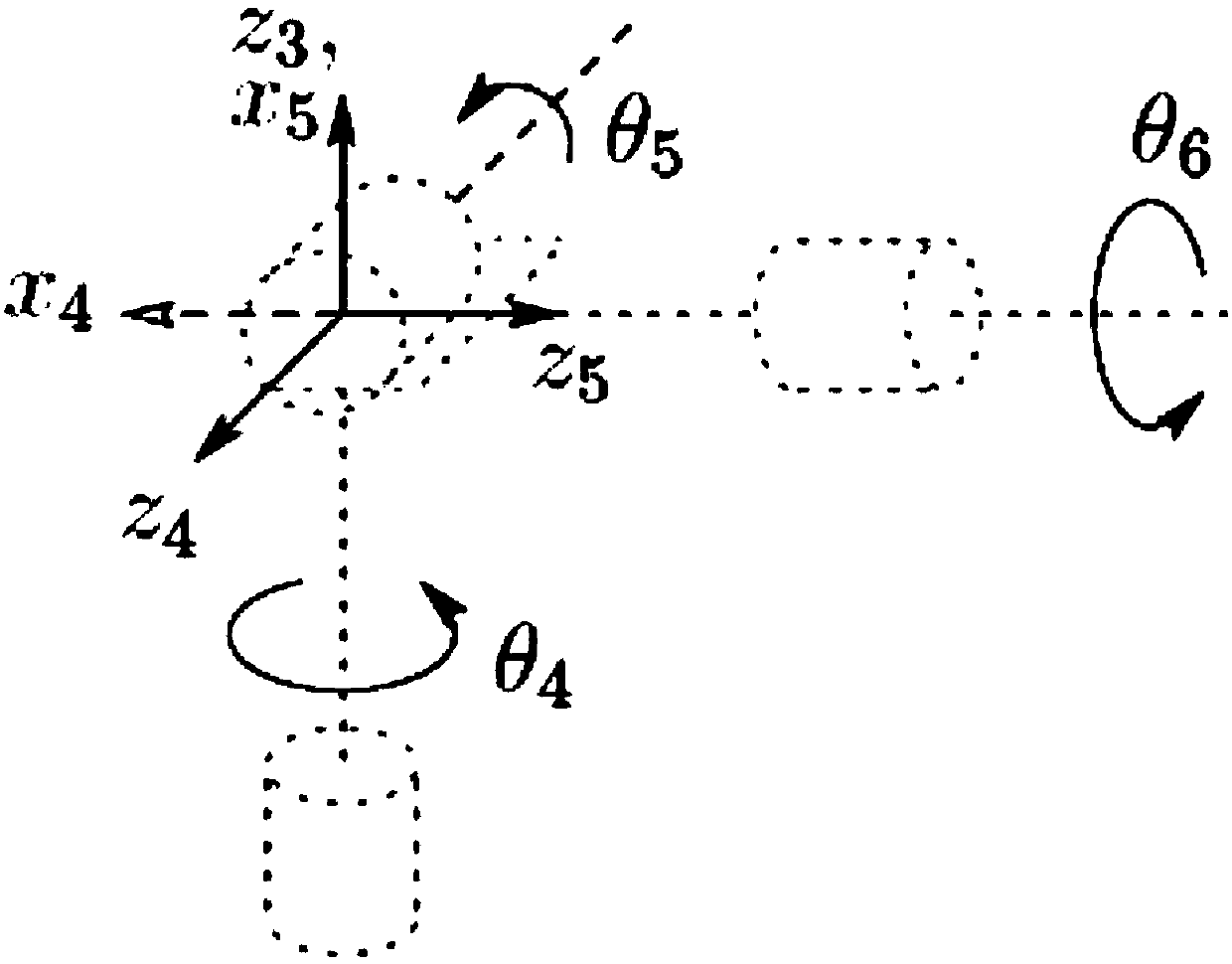
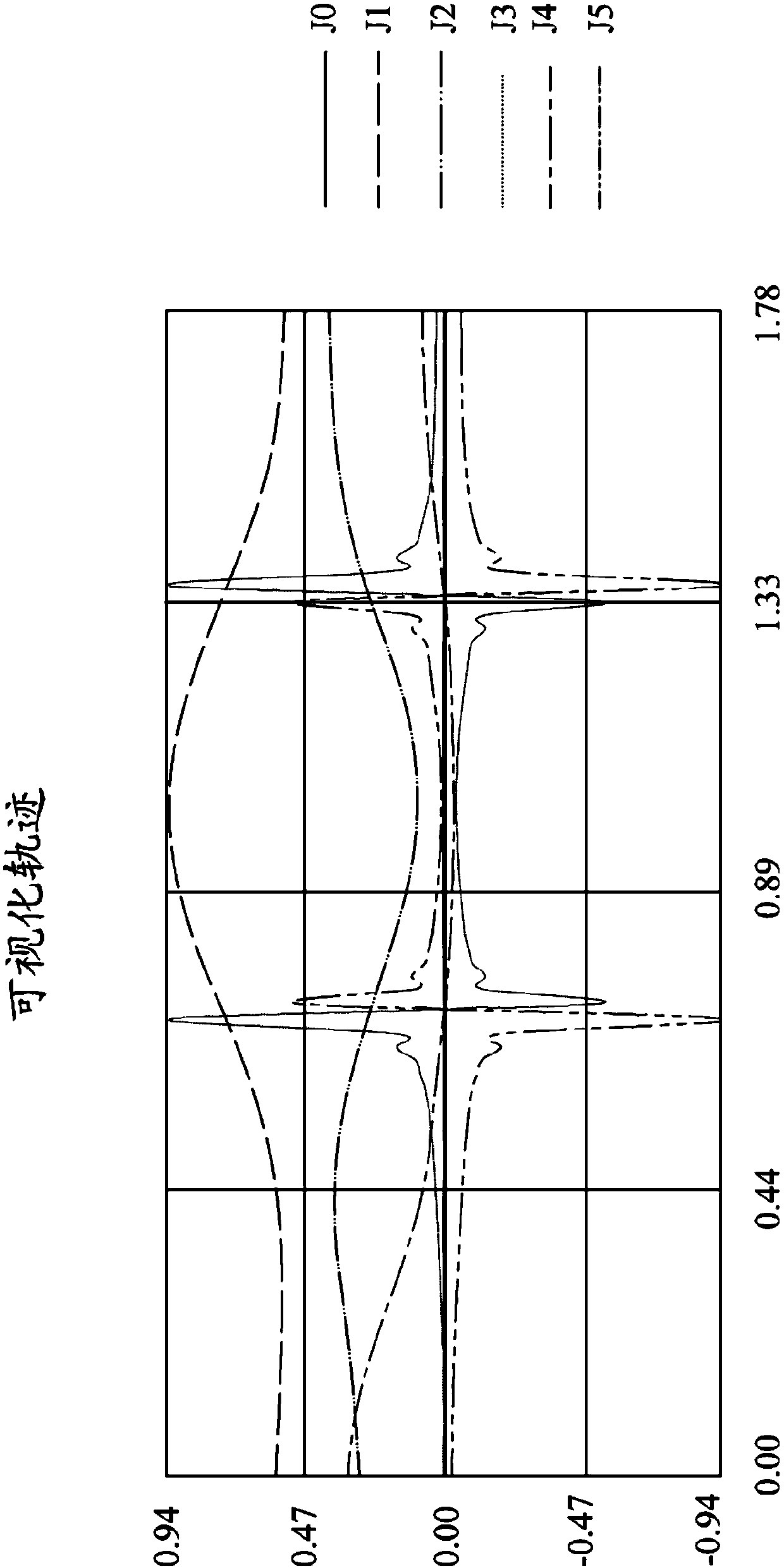
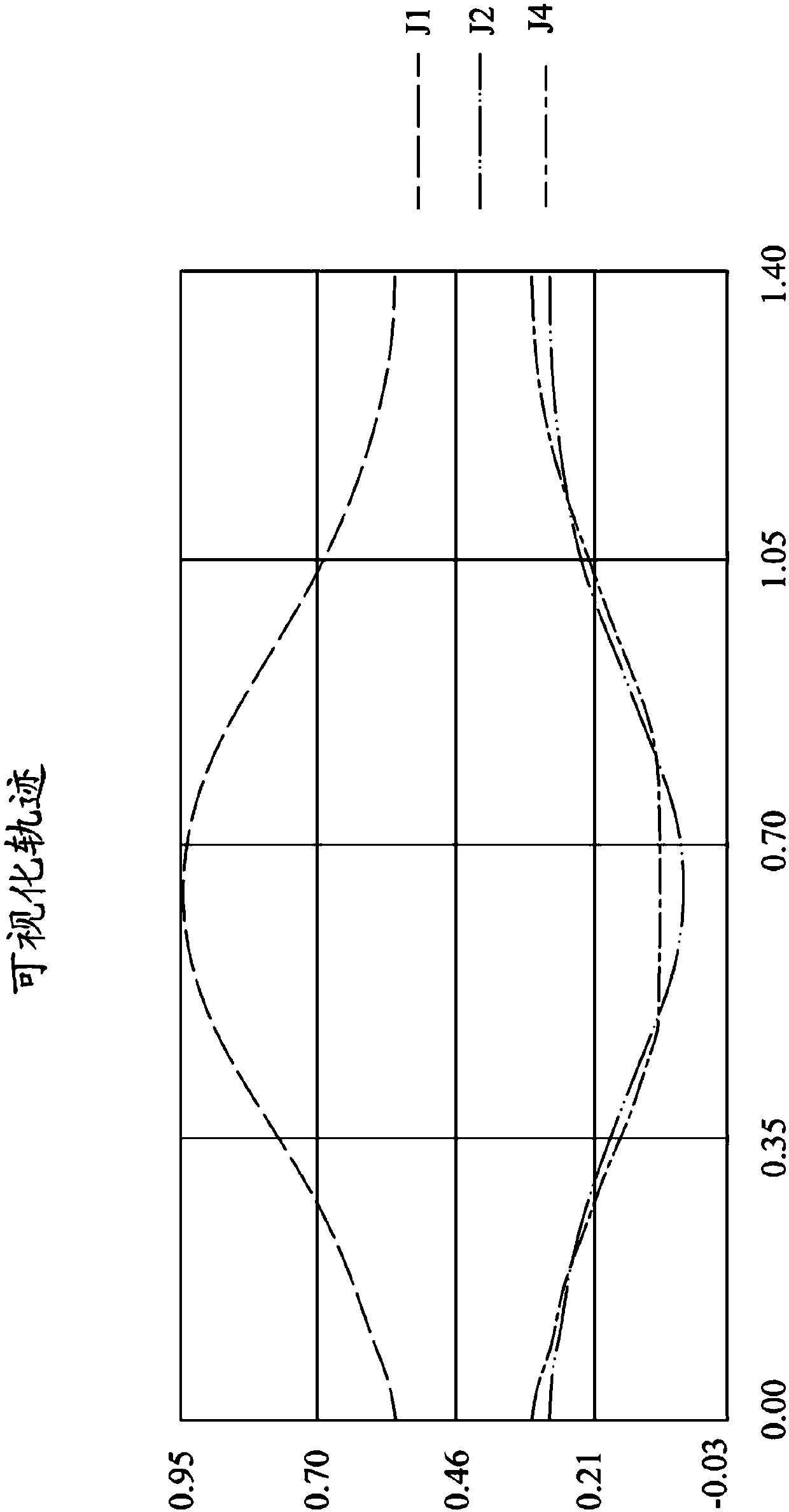
[0026] figure 1 A schematic diagram of a spherical wrist of an industrial robot. Three adjacent rotary joints whose rotating shaft axes intersect at one point of the industrial robot constitute each said spherical wrist. When the absolute value of the joint angle of the second joint of the spherical wrist viewed from the base of the industrial robot to the end effector is close to 0 degrees, the rotation axis of the first joint and the rotation axis of the third joint of the spherical wrist Close to the coincidence, that is, the singular point of the wrist is formed. figure 2 It is a common motion path of an industrial robot with a spherical wrist through a kinematic singularity point, and the singularity of the motion path is caused by the kinematic characteristics of the spherical wrist. image 3 for figure 2 The change curve of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More