

Large-area coverage electronic skin system with long-distance approach sense
An electronic skin, long-distance technology, applied in the direction of manufacturing tools, program control manipulators, instruments, etc., can solve the problems of poor scene adaptability, immaturity, and poor detection accuracy, and achieve the effect of improving the early warning distance and enhancing the effectiveness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
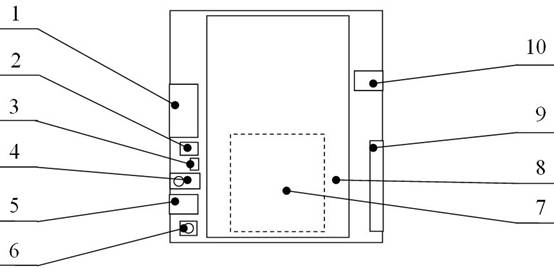
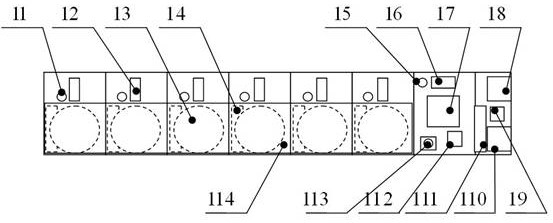
[0032] The present invention provides a large-area covered electronic skin system with long-distance proximity sense, which includes:
[0033] Basic sensing unit; the basic sensing unit includes several sensing modules and processing modules, the sensing modules can be mutually extended couplets, and the sensing modules include a contact force detection module for sensing contact force perception information 14 and a long-distance proximity sensing mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More