

Similarity-in-form and similarity-in-spirit combined person simulating double-arm robot motion planning control method
A technology of robot movement and planning control, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., which can solve the problems that the motions cannot be guaranteed to be similar to those of humans, and the motion characteristics cannot be guaranteed, so as to achieve the effect of improving the execution effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
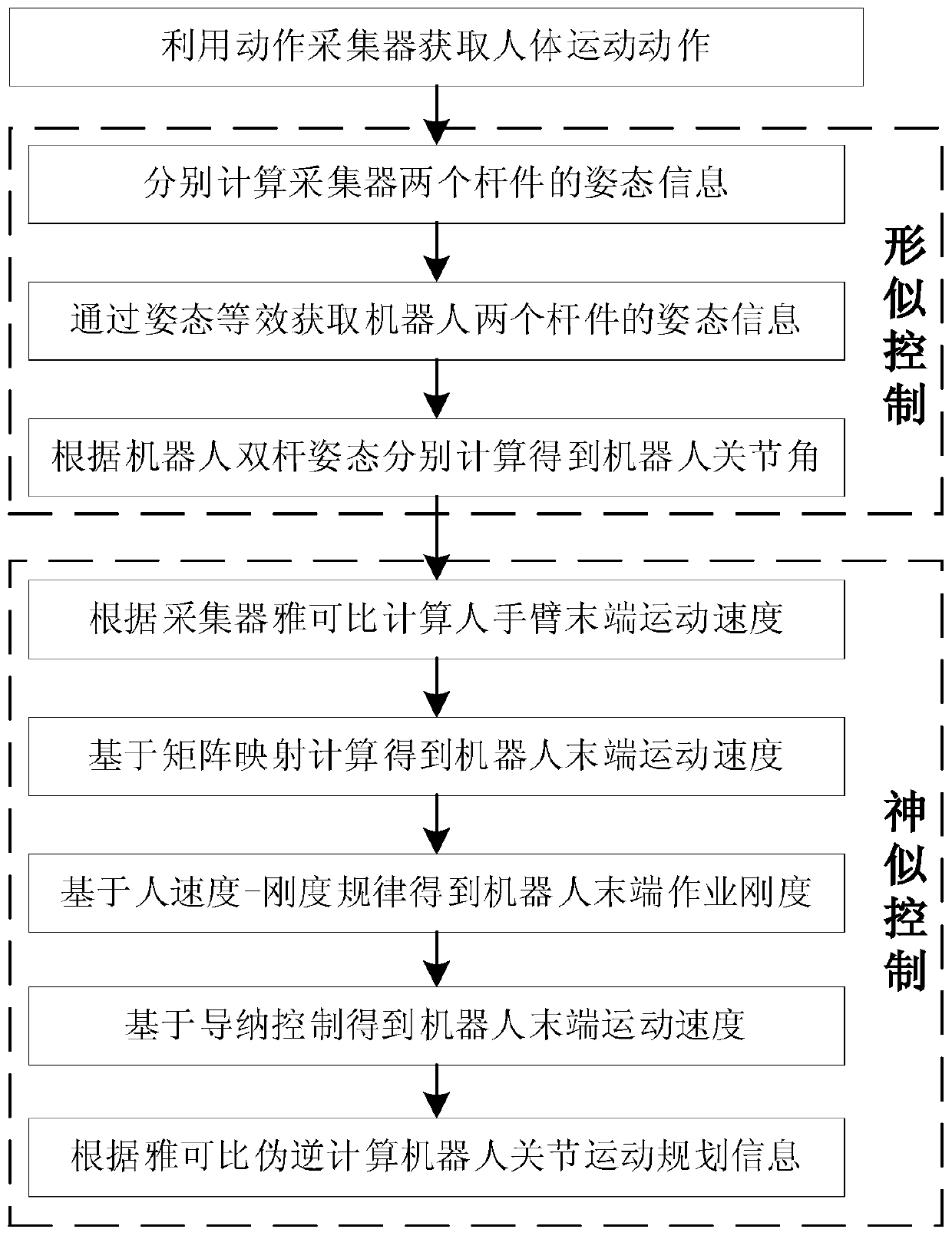
[0047] as attached figure 1 As shown, the present invention provides a motion planning control method for a humanoid dual-arm robot that combines appearance and spirit, and the method includes the following steps.
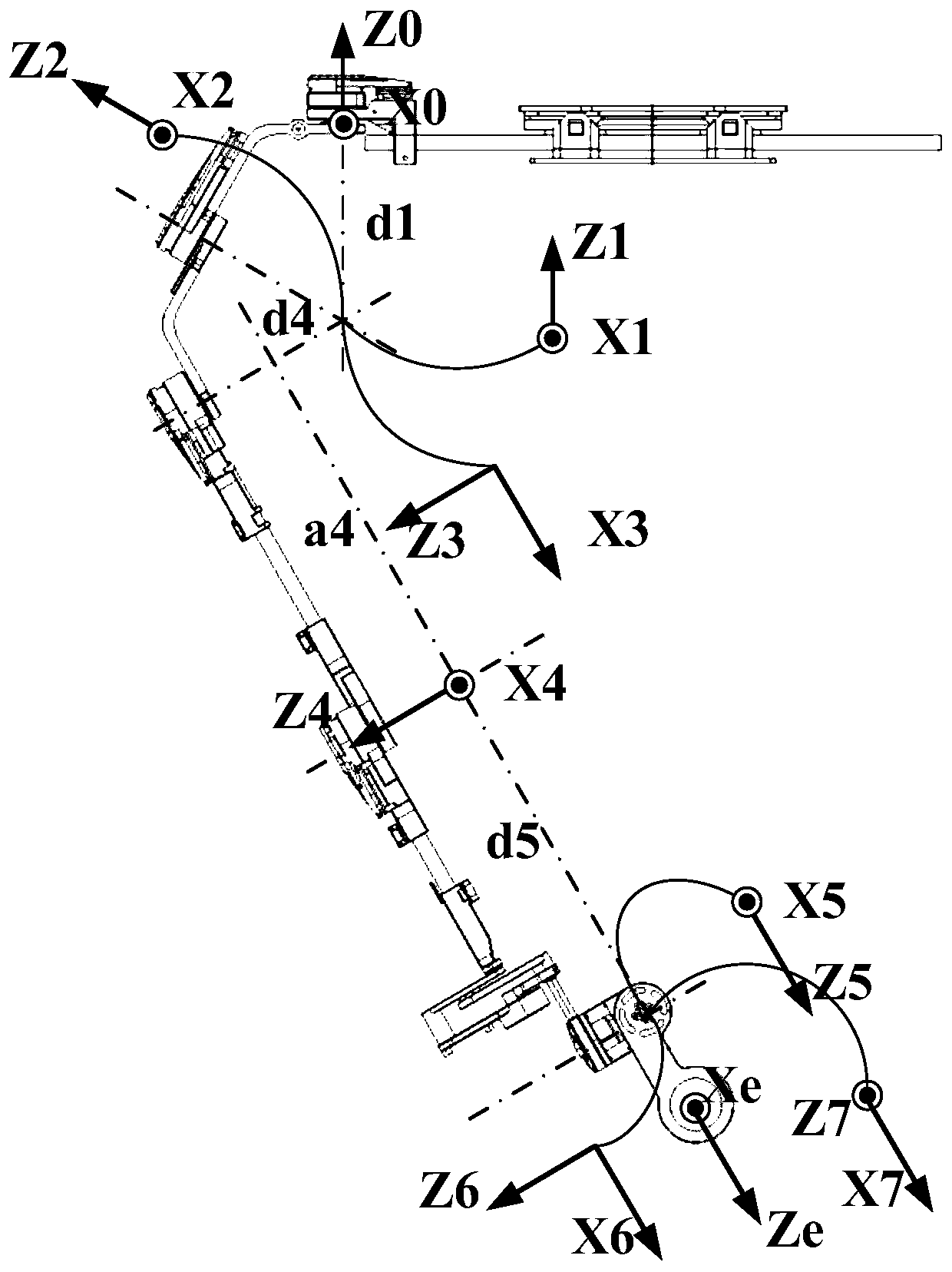
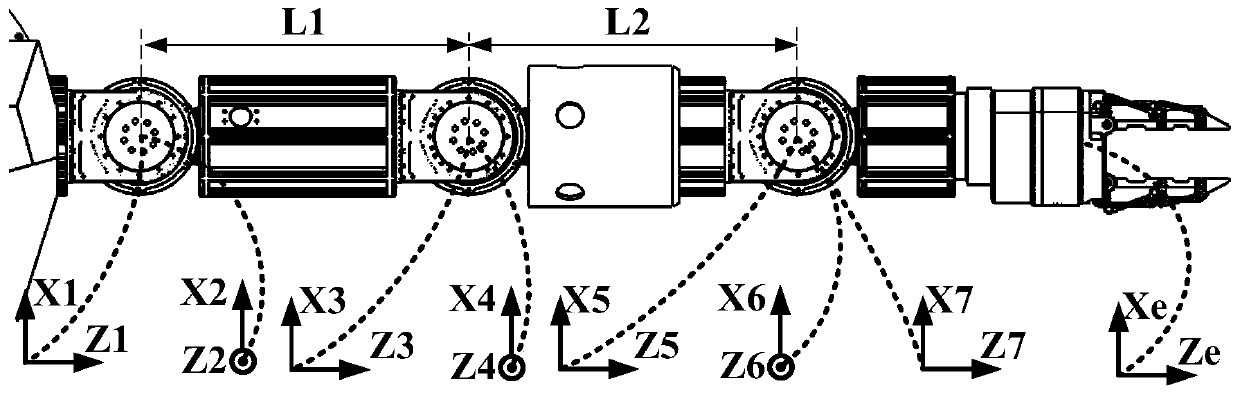
[0048] Step 1: The operator wears the motion collector, uses the vision of the robot's head to observe the working environment remotely, and performs exercises based on his own experience. The motion collector collects human motion information and converts the human motion into a seven-degree-of-freedom manipulator. Motion joint angle Θ c and joint angular velocity The structure of the action collector is as follows figure 2 As shown, the motion collector includes two rods and 7 joints connected in series, with 7 degrees of freedom; the joints include joint 1, joint 2, and joint 3 of the shoulder, joint 4 of the elbow, And the joint 5, joint 6, and joint 7 of the wrist.
[0049] Although the motion collector described above adopts a structure including two ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More