

Robot curve path generation method, system and device and storage medium
A path generation and robot technology, applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., can solve problems such as consuming a lot of time, difficult to unify the form, and not meeting the requirements of smooth motion of robots, etc., to achieve a highly reusable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0090] The following combination Figure 2-Figure 10 A detailed explanation of the above method:
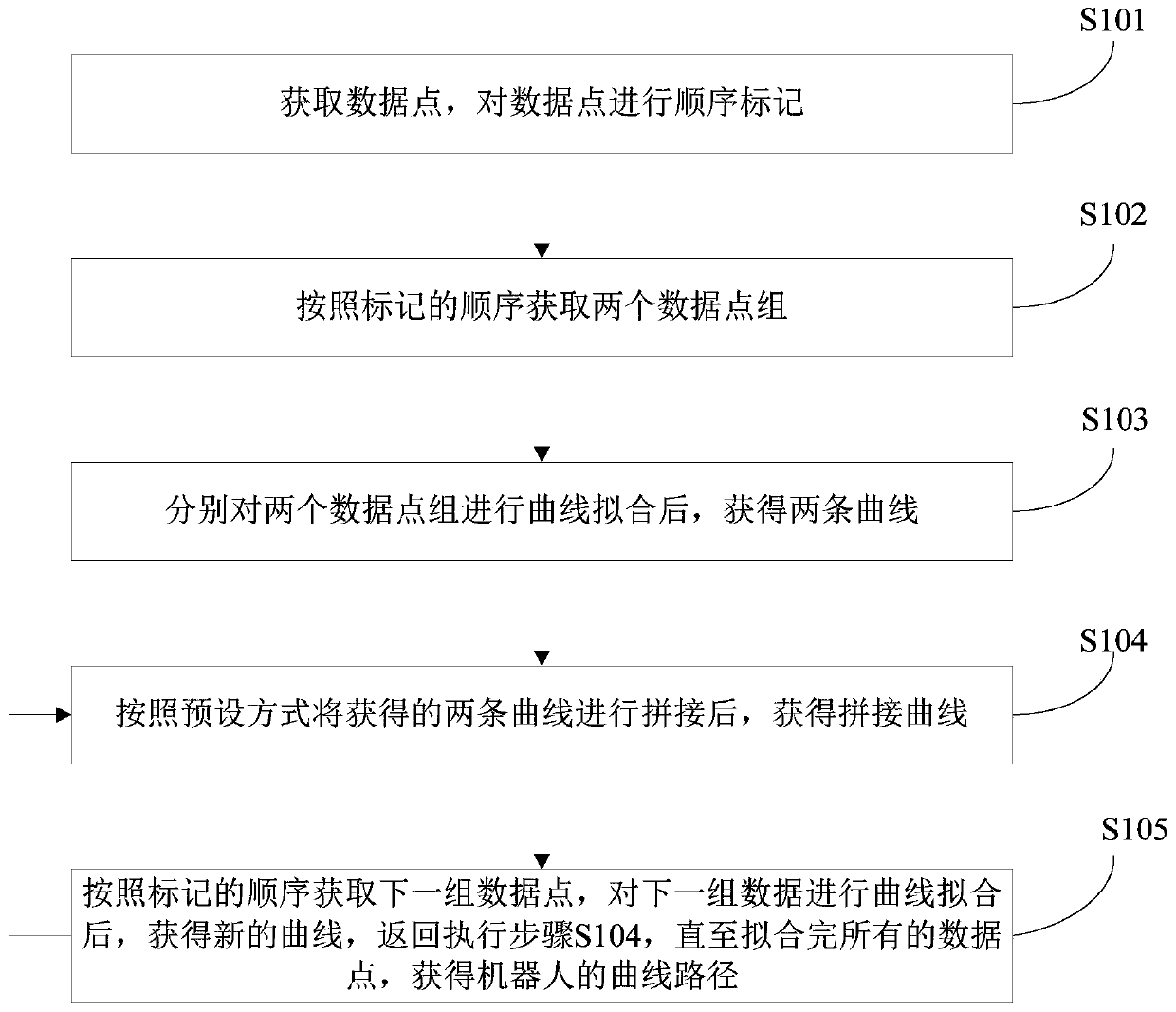
[0091] refer to figure 2 and Figure 10 , a method for generating a robot curve path, comprising the following steps:
[0092] S1: collect no less than three free curve space data points, every three consecutive points of the space data points are not collinear, adjacent points are not the focus, and the data points are three-dimensional space coordinates (X, Y, Z );
[0093] S2: Mark all collected data points in positive order of 1, 2, 3, ..., n;
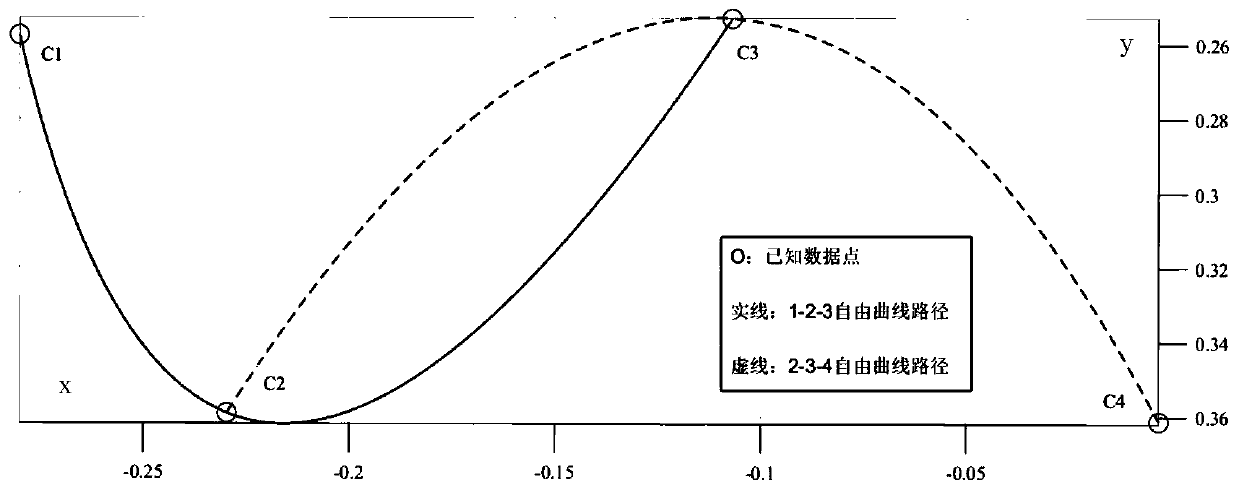
[0094] S3: Divide the data points into n-2 sections of paths according to the order of 1-2-3, 2-3-4, 3-4-5, ..., n-2-n-1-n, and each path is three A cubic B-spline curve with a parabolic boundary determined by the data points;
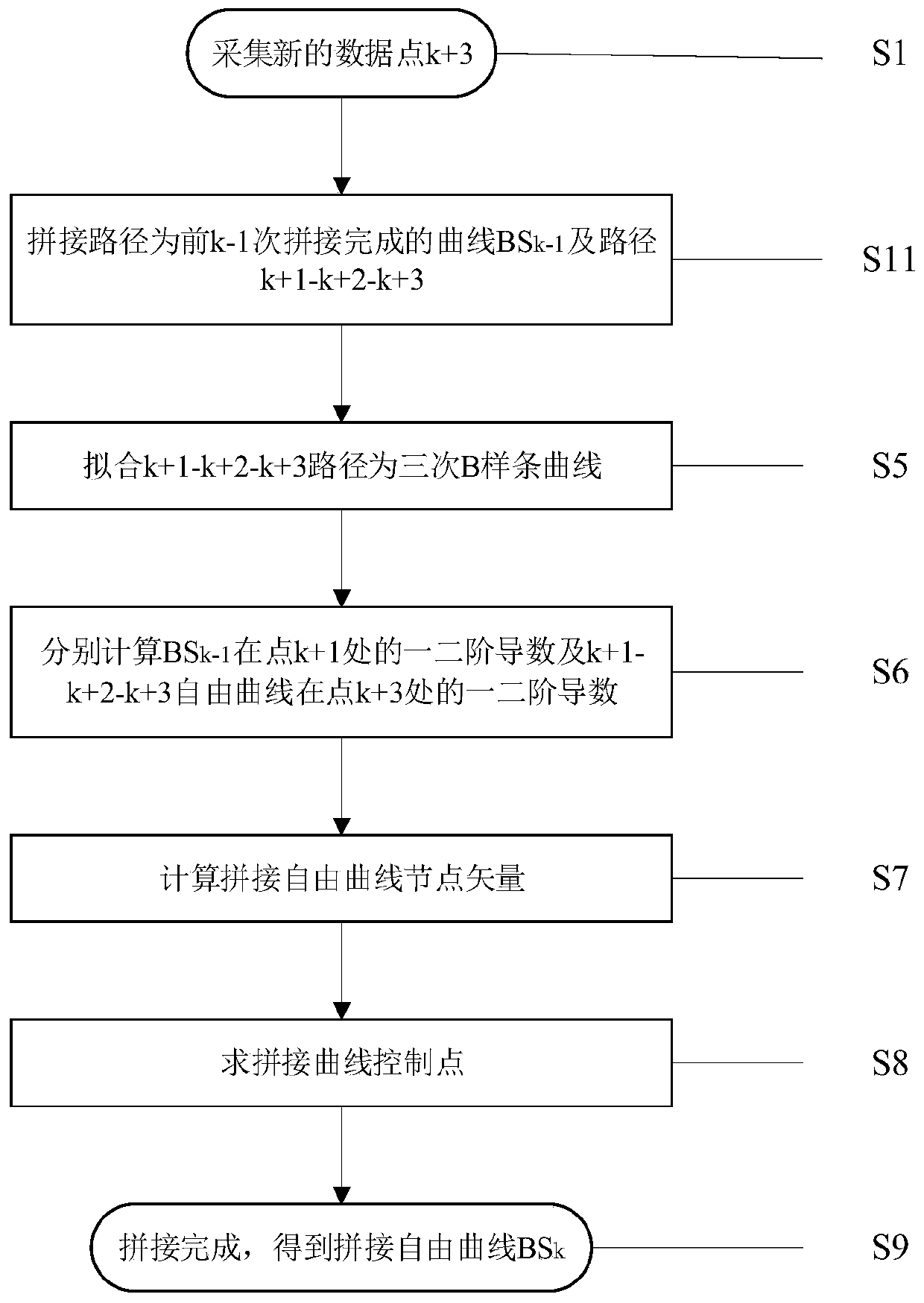
[0095] S4: When the number of data points is n, the mosaic planning needs to be executed n-3 times, including steps S2-S9:
[0096] S5: In the first splicing, spline curves whose data points are 1-2-3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More