

Motion control system for oblique wrist spray robot and method thereof
A technology of motion control system and spraying robot, which is applied in the field of intelligent robots to solve the problem of inverse kinematics without closed solution and ensure high precision and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
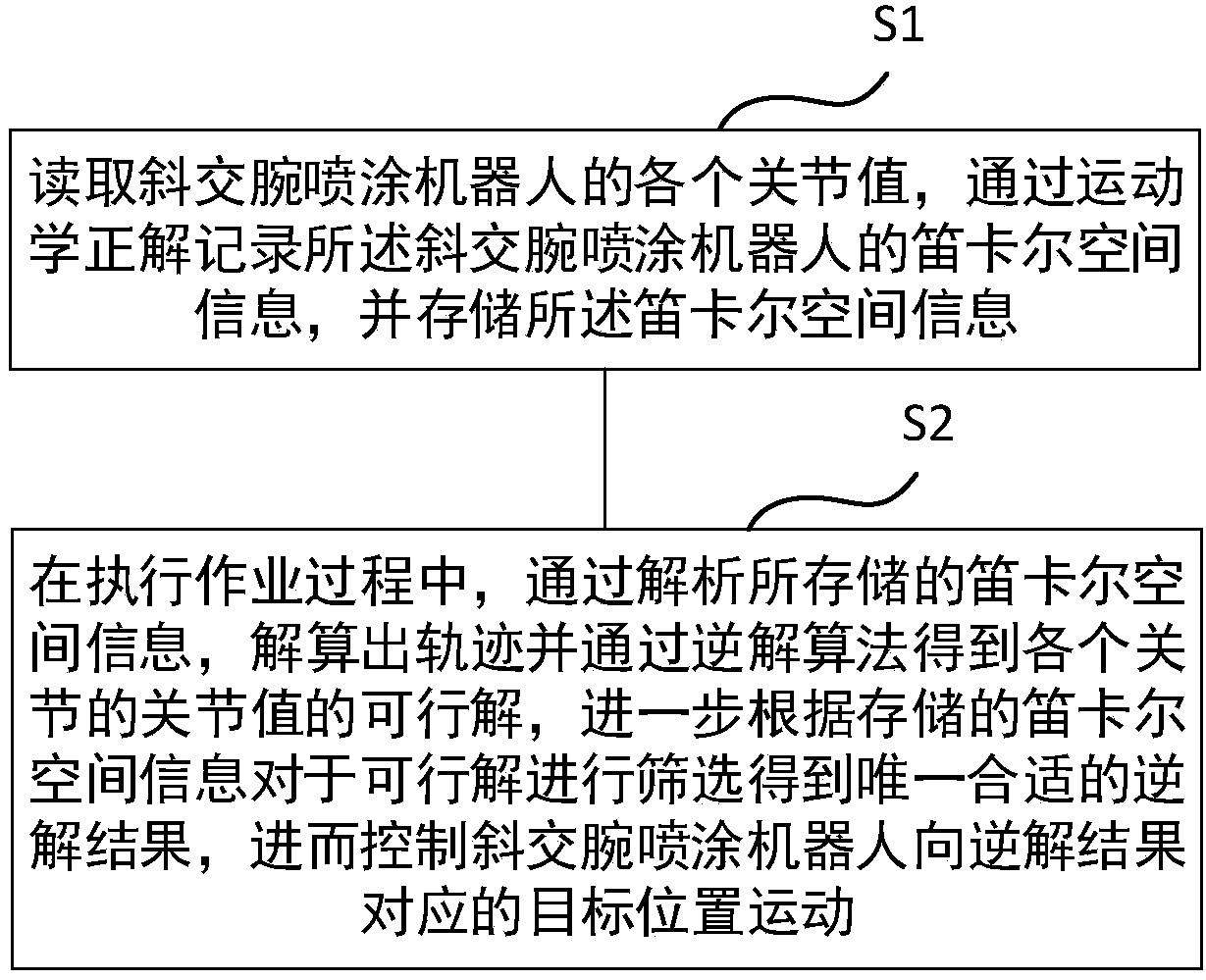
[0021] see figure 1 , figure 1 It is a flow chart of a motion control method for an oblique wrist spraying robot provided by an embodiment of the present invention. Such as figure 1 As shown, the motion control method of this embodiment includes the following steps:
[0022] Step S1: Read the values of each joint of the oblique wrist spraying robot, record the Cartesian space information of the oblique wrist spraying robot through the kinematics forward solution, and store the Cartesian spatial information.
[0023] This step is performed during the teaching process of the oblique wrist spraying robot.
[0024] Step S2: In the process of executing the operation, by analyzing the stored Cartesian space information, the trajectory is calculated, and the feasible solution of the joint value of each joint is obtained through the inverse solution algorithm, and the feasible solution is further screened according to the stored Cartesian space information The only suitable inve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More