

Trajectory planning and velocity planning method based on bezier curve transition smoothing
A Bezier curve and speed planning technology, applied in the field of UAV navigation, can solve the problems of low efficiency of speed planning methods, low time efficiency, and high cost of path planning computing power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The following describes several preferred embodiments of the present invention with reference to the accompanying drawings, so as to make the technical content clearer and easier to understand. The present invention can be embodied in many different forms of embodiments, and the protection scope of the present invention is not limited to the embodiments mentioned herein.
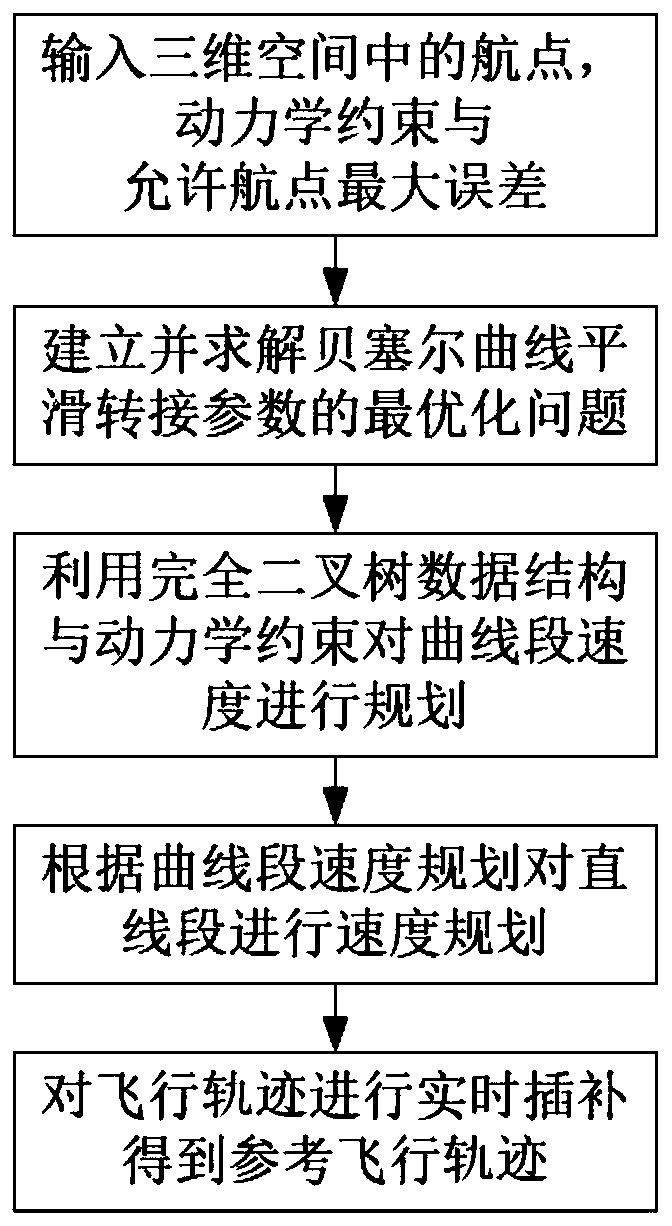
[0069] like figure 1 As shown, the trajectory planning and speed planning method based on Bezier curve transfer smoothness provided by the present invention comprises the following steps:
[0070] Step 1: Input the waypoint in the three-dimensional space, the dynamic constraints (maximum speed, maximum acceleration, maximum jump) and the maximum error of the allowable waypoint;
[0071] Step 2: With the length of the straight line segment and the maximum allowed trajectory smoothing error as constraints, establish and solve the optimization problem of smooth transition parameters of each Bezier curve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More