

Large-scale three-dimensional environmental map establishing method based on graph optimization theory
An environment map, large-scale technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of ensuring efficiency and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with accompanying drawing.
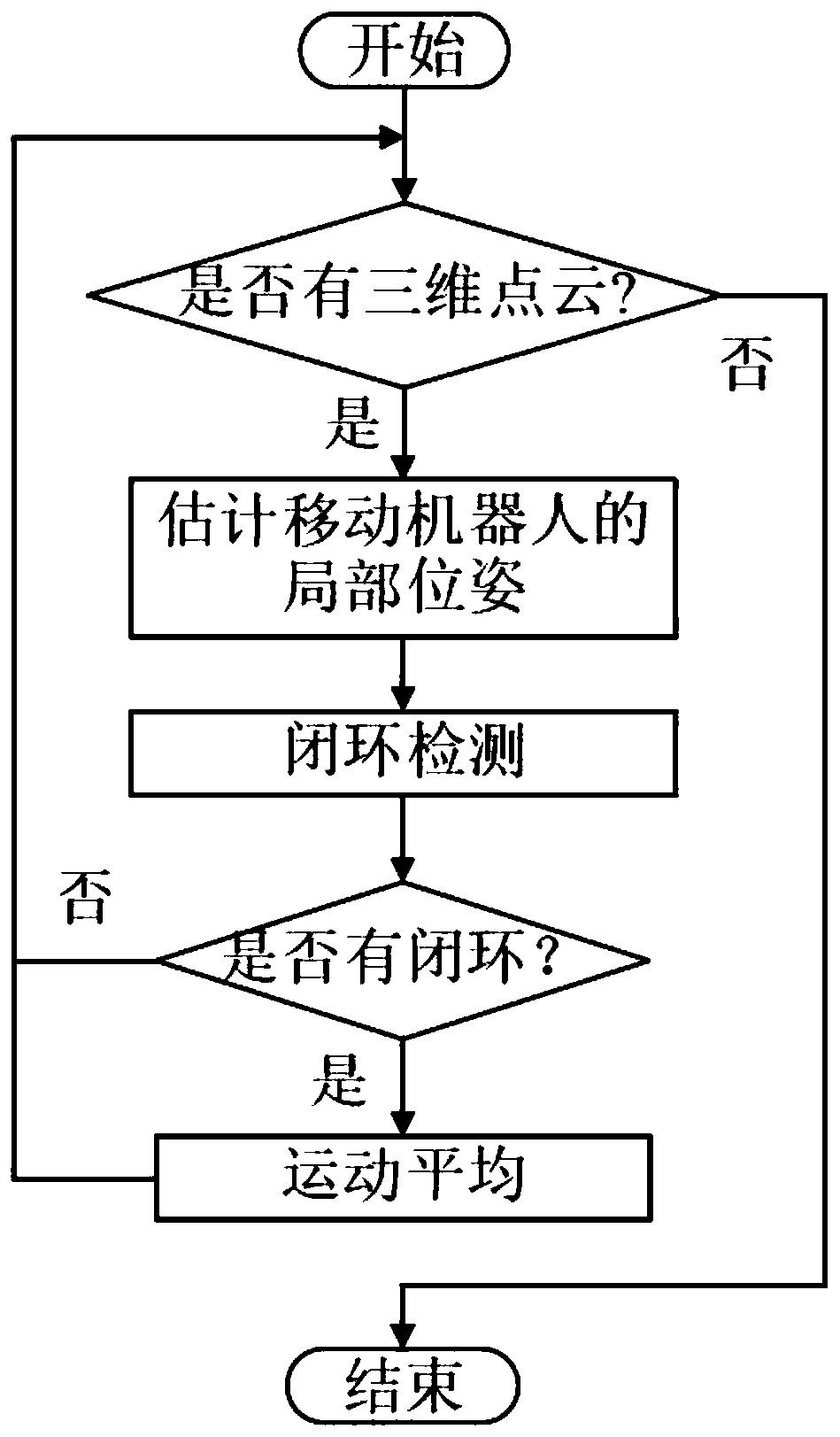
[0052] see figure 1 , the large-scale 3D environment map creation method based on graph optimization theory is divided into three parts, each part includes the following steps:
[0053] 1) The local pose is obtained by the clipping iterative closest point algorithm and the fast multi-scale descriptor-based corresponding propagation algorithm. The specific steps are as follows:
[0054] (1a) Register two frames of 3D point clouds acquired at adjacent moments by clipping iterative closest point algorithm;
[0055] (1b) After obtaining the registration result, verify the registration result; if the verification is successful, the registration result can be output as the pose estimation result of the mobile robot;
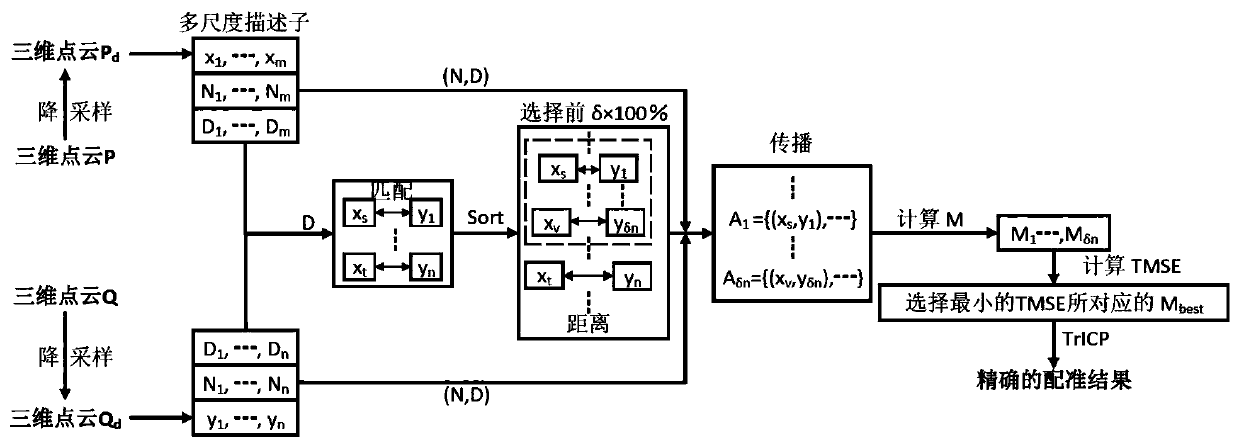
[0056] (1c) If the verification fails, use a fast multi-scale descriptor-based correspondence propagation algorithm to re-estimate the local pose of the mobile ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More