Mechanism and control method of a single-leg robot for wall jumping
A control method and robot technology, which is applied in the field of robots, can solve the problems that the robot cannot continuously jump, cannot have a large impact force, and the acceleration is small, so as to achieve the effect of improving the application occasion and movement ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with accompanying drawings and examples.
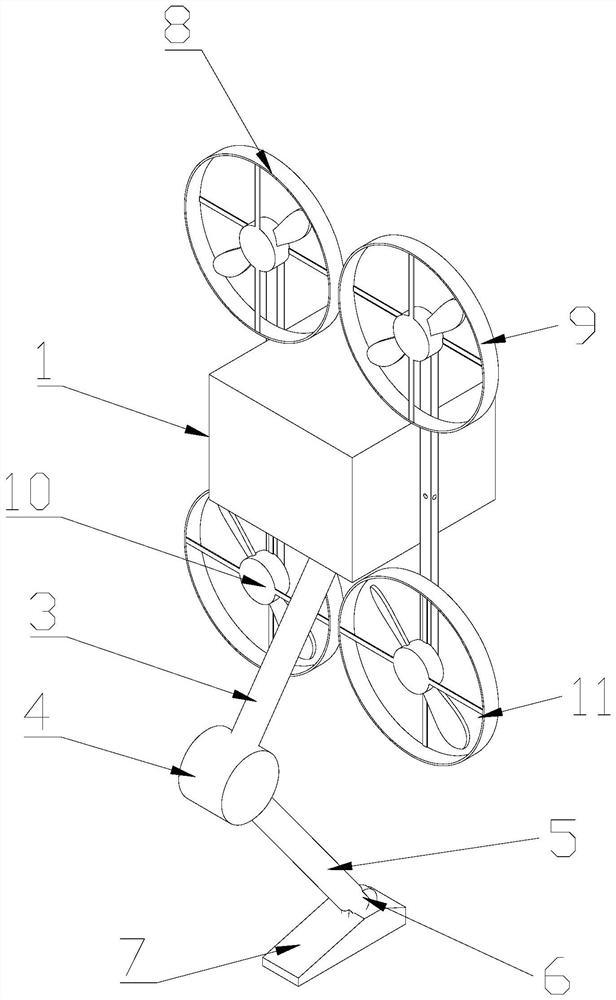
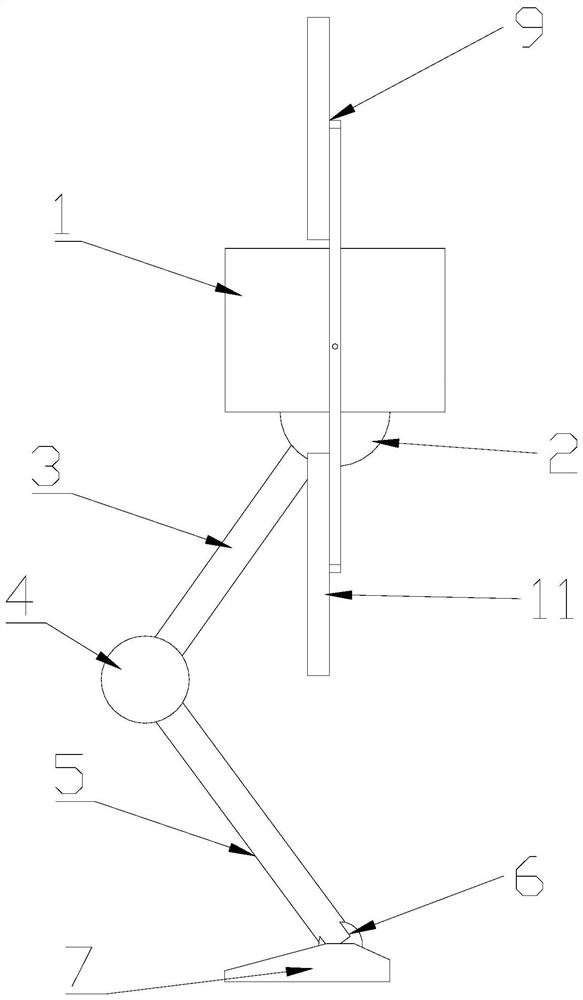
[0028] Such as Figure 1-2 As shown, a single-leg robot mechanism for wall jumping includes a robot leg, and a plurality of rotors are fixedly connected to the fuselage 1 of the robot leg. The working surfaces of the rotors are parallel to each other.
[0029] A controller and a gyroscope are installed inside the fuselage 1, and the gyroscope and a plurality of rotors are all connected to the controller.
[0030] The quantity of a plurality of rotors in the present embodiment is four, respectively is upper left rotor 8, upper right rotor 9, lower left rotor 10, lower right rotor 11; described rotor can adopt the rotor of unmanned aerial vehicle, but is not limited to this.
[0031] Further, the robot leg includes sequentially hinged fuselage 1, thigh 3, calf 5 and foot 7, the hinge of the fuselage 1 and thigh 3 is provided with a hip joint 2 that drives the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com