

Variable-rigidity flexible mechanical arm
A technology of changing stiffness and fingers, applied in the field of manipulators, it can solve the problems of small change of elastic modulus and narrow range of stiffness change.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
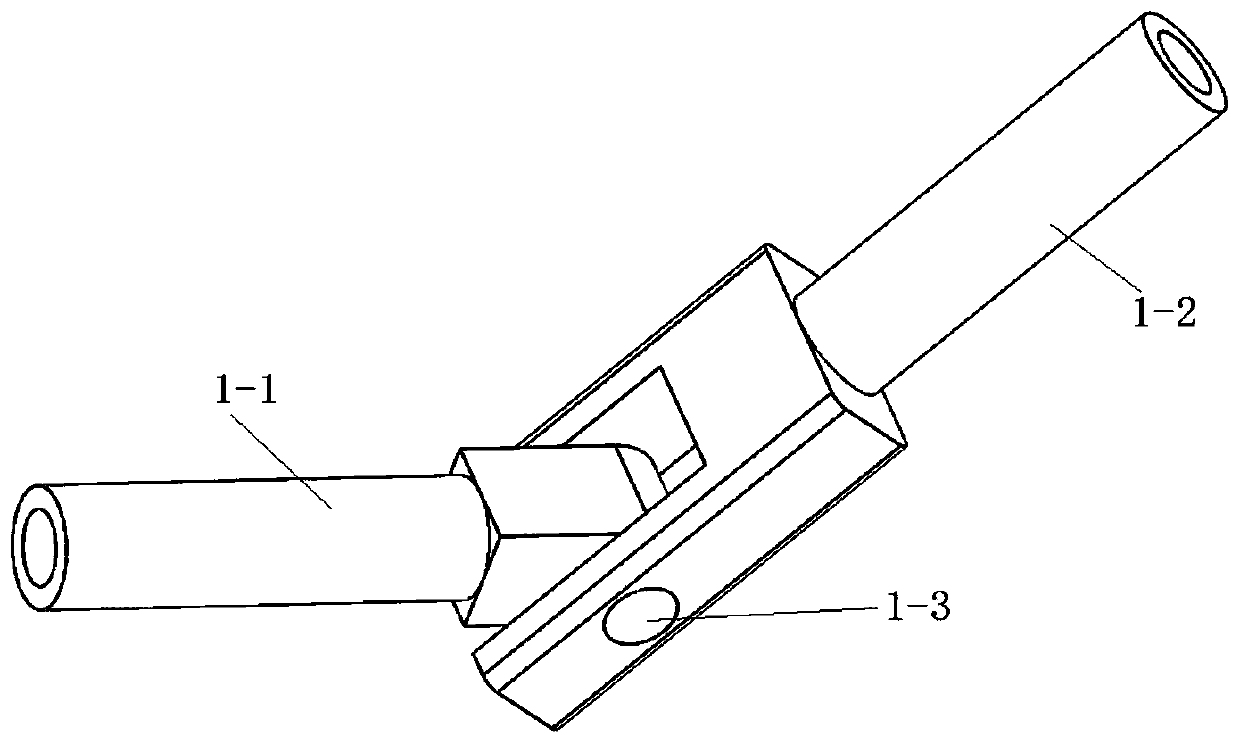
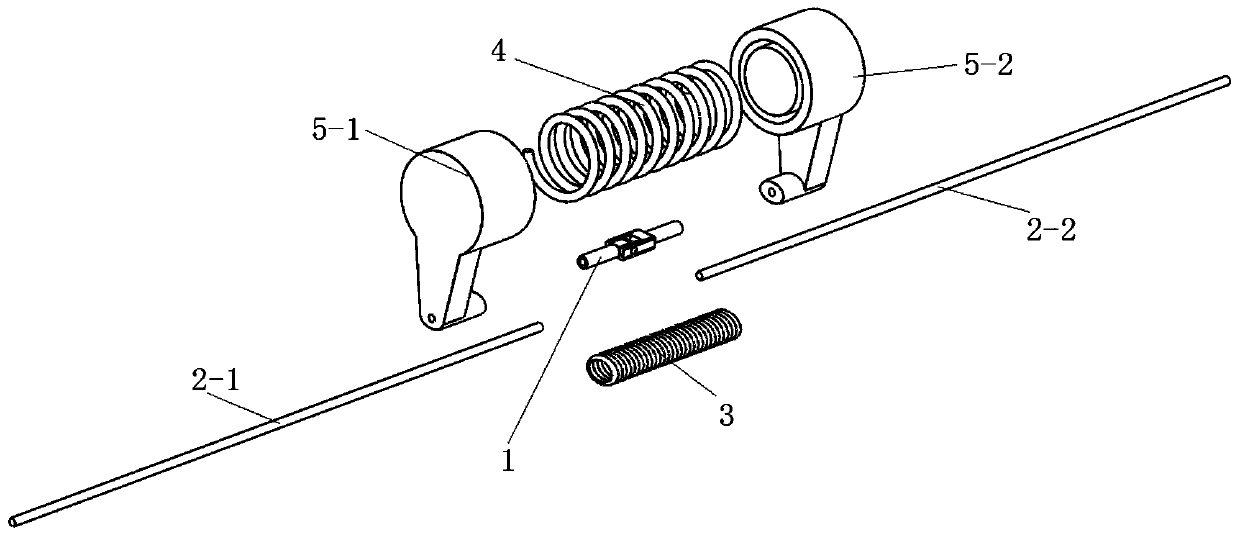
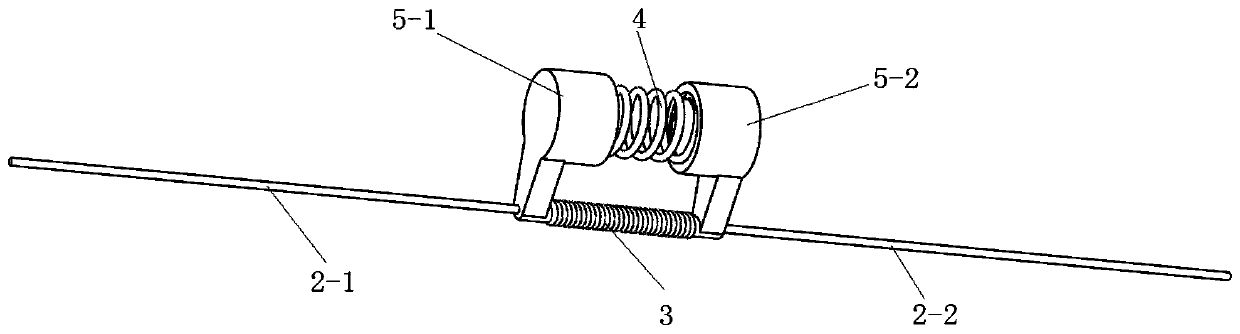
[0036] A variable stiffness drive structure, such as figure 2 with image 3 As shown, the rotating structure 1 is included, and the two ends of the rotating structure 1 are respectively fixed with superelastic shape memory alloy wires, that is, the first superelastic shape memory alloy wire 2-1 and the second superelastic shape memory alloy wire 2-2. The structure 1 is covered with a bellows 3, and the bellows 3 is filled with a low melting point alloy. The two ends of the bellows 3 are sealed by a spring bracket, and the spring bracket is fixedly connected to the superelastic shape memory alloy wire. The first spring bracket 5 A shape memory alloy spring 4 is also fixed between -1 and the second spring bracket 5-2; by heating and cooling the low melting point alloy, the rotating structure 1 is switched between the rotating and locking states.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More