

Natural property based vision servo grabbing method of flying mechanical arm
A technology of visual servo and robotic arm, which is applied in the direction of manipulator, aircraft, program control manipulator, etc., to achieve the effect of high-efficiency grasping and great application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0060] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
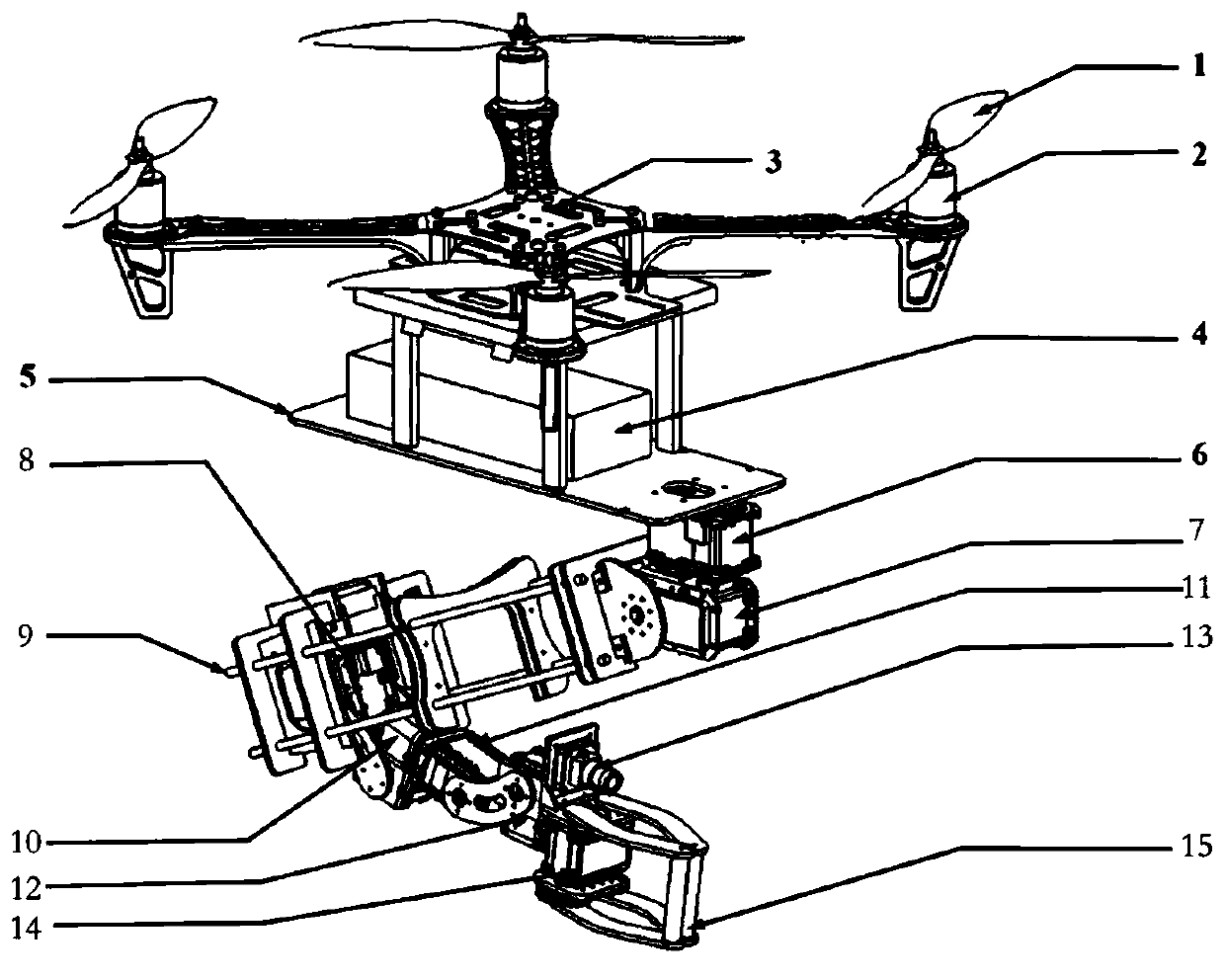
[0061] Such as figure 1 As shown, the flying robot arm includes a drone body 3 and a robot arm, on which a robot arm base 5, a number of evenly distributed propellers 1, and a propeller motor 2 for controlling the rotation of the propeller are arranged on the drone body 3; An accommodating space is formed between the arm base 5 and the drone body 3, the battery 4 is accommodated in the accommodating space, the mechanical arm is fixedly installed on the lower surface of the mechanical arm base 5, and the mechanical arm A plurality of revolving joints are set, and each revolving joint corresponds to a degree of freedom. Each revolving joint is provided with a steering gear, and a gripper 15 and a camera 13 are arranged at the end of the mechanical arm. There is a mechanical arm connection bracket 9, and a control system is arranged on the drone bod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More