

A Linear Feedback Gain Scheduling Control Method Based on Complex Mode
A gain scheduling control, linear feedback technology, used in mechanical oscillation control, control/regulation systems, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0013]The specific embodiments are described below in conjunction with the drawings.
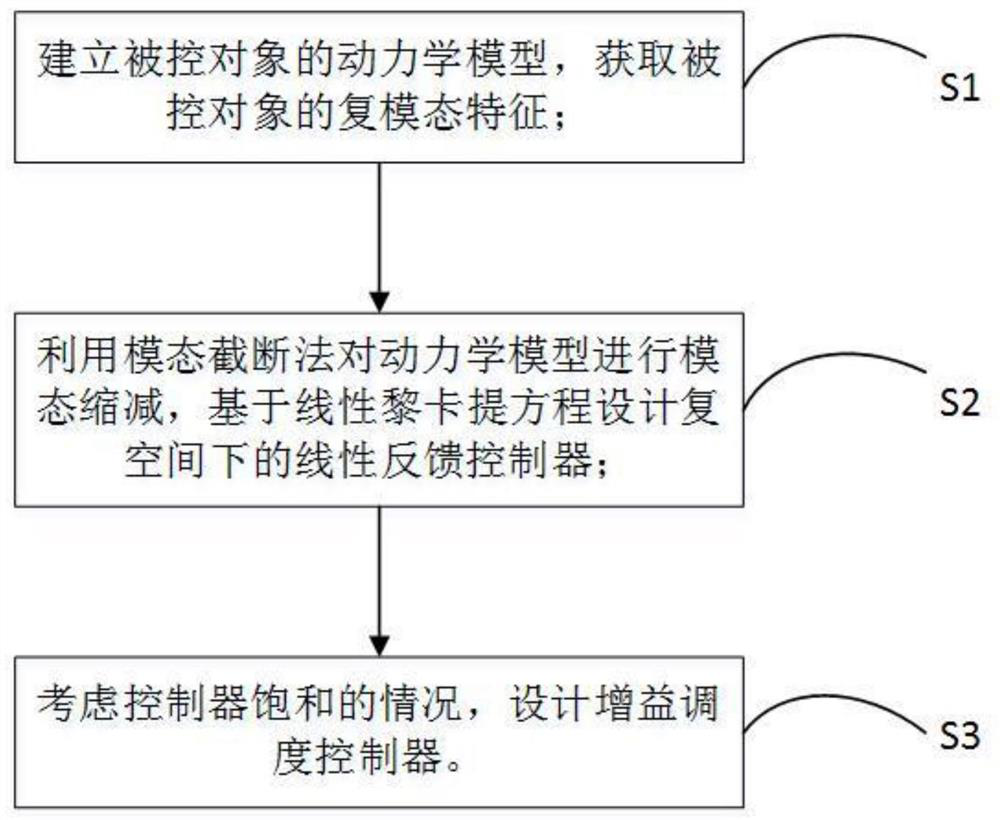
[0014]The present invention mainly has three steps, such asfigure 1 As shown, the specific process is described in detail as follows:
[0015]S1: Establish the dynamic model of the controlled object, analyze and obtain the complex modal characteristics of the controlled object in the complex space;
[0016]Sub-step S11: establish a dynamic model of the controlled object;
[0017]The mathematical model of the controlled object is established based on the Hamiltonian principle, and the control equation is as follows
[0018]
[0019]In the formula, δ (N×1, N system degrees of freedom) is the system degree of freedom; M(N×N), K(N×N) are the mass and stiffness matrices, respectively, which are symmetrical matrices; C(N×N) is The sum of the damping matrix and the gyro matrix. When neglecting the damping matrix, the matrix C is antisymmetric. P(N×1) represents the gyro force vector, and F(N×1) represents the external loa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More