

Floor mopping robot with position limiting rotational structure
A technology of a sweeping robot and a rotating structure, applied in the field of sweeping robots, can solve the problems of inability to move, the sweeping robot is stuck, hindering the sweeping robot from retreating, etc., and achieves the effect of good slope and steering functions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
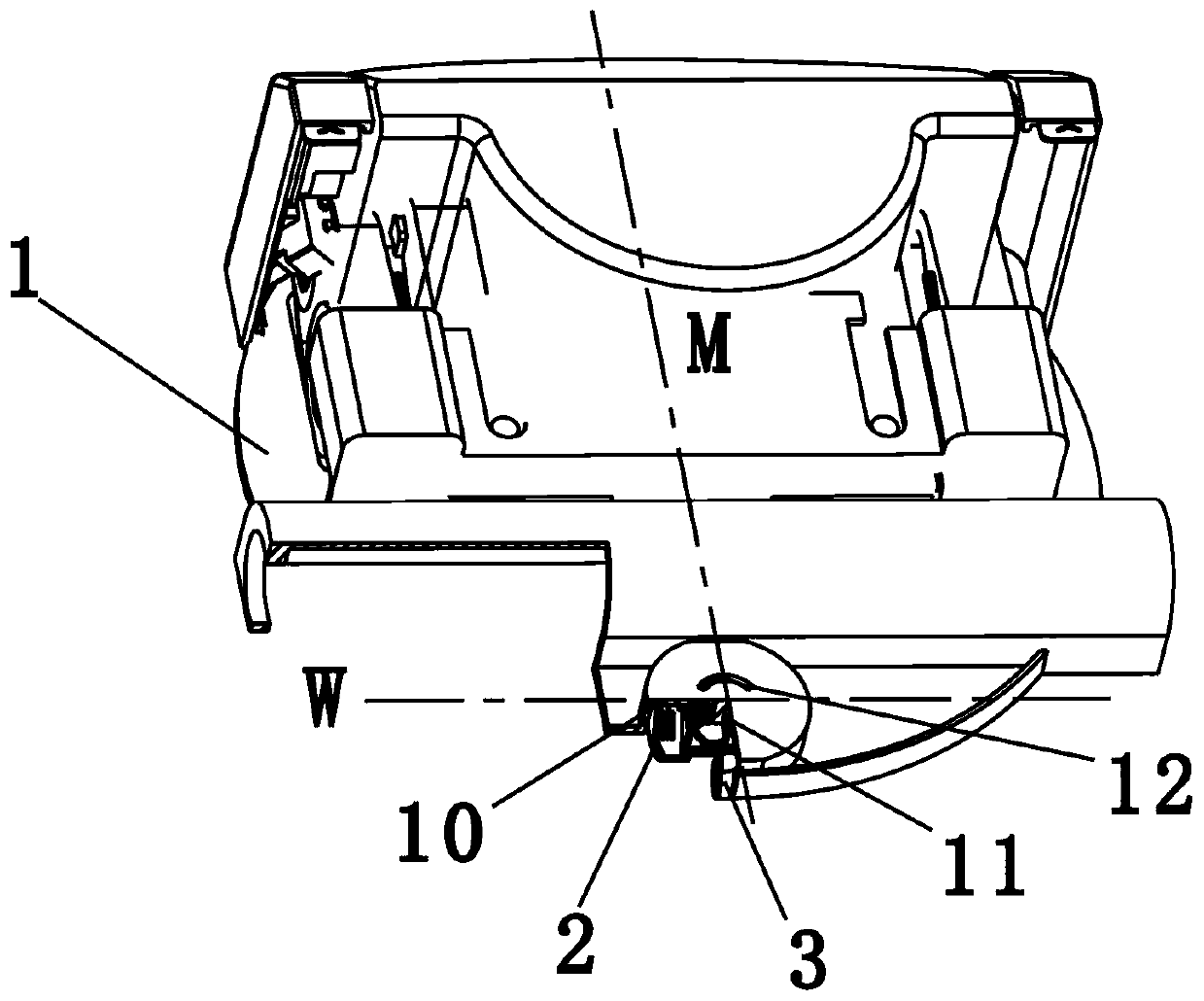
[0037] Such as image 3 , Figure 4 Shown is a schematic structural diagram of an embodiment of the present invention. A sweeping robot includes a base (not shown in the figure), a base at the bottom of the base 1, two traction units (not shown in the figure) installed on the base 1 and used to drive the base 1 and the base to move A biasing device 2 at the rear of the base and a guide wheel 3 mounted on the biasing device 2. The base 1 is provided with a mounting cavity 10, and the mounting cavity 10 is provided with a rotating shaft 11, and the biasing device 2 is mounted In the installation cavity 10 and rotates relative to the rotating shaft 11, and the biasing device 2 has a first position stored in the installation cavity 10 and a second position expanded from the installation cavity 10, in which a limit chute is provided 12. The biasing device 2 is provided with a rotation stop part that can slide on the limiting chute, and the biasing device 2 rotates around the rotatin...
Embodiment 2
[0049] Such as Picture 10 , Picture 11 Shown is a schematic structural diagram of another embodiment of the present invention. The difference between this embodiment and the first embodiment is that: in this embodiment, the limit chute 12 is located in the circumferential direction of the installation cavity, and the limit end is the end wall 121 of the upper limit chute on the circumferential wall of the installation cavity. The part is a first convex post 221 and a second convex post 222 which are arranged on the peripheral wall of the second rotating body 22 and protrude outward. When the first rotating body 21 drives the second rotating body 22 to rotate to the first convex post 221 or the second convex post 221 When the two protruding posts 222 abut against the end wall 121, the first rotating body stops rotating, wherein the first protruding post 221 and the second protruding post 222 are in a vertical plane relative to the line connecting the center of the second rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More