

A Complex Road Handling Robot Based on Parallel Mechanism
A handling robot and parallel technology, which is applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of complex road transportation that cannot be effectively solved, the threat to the lives and property of workers, and the lack of mechanized devices, etc., to achieve stability and security in the transportation process The effect of transporting mass and increasing the rotational arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
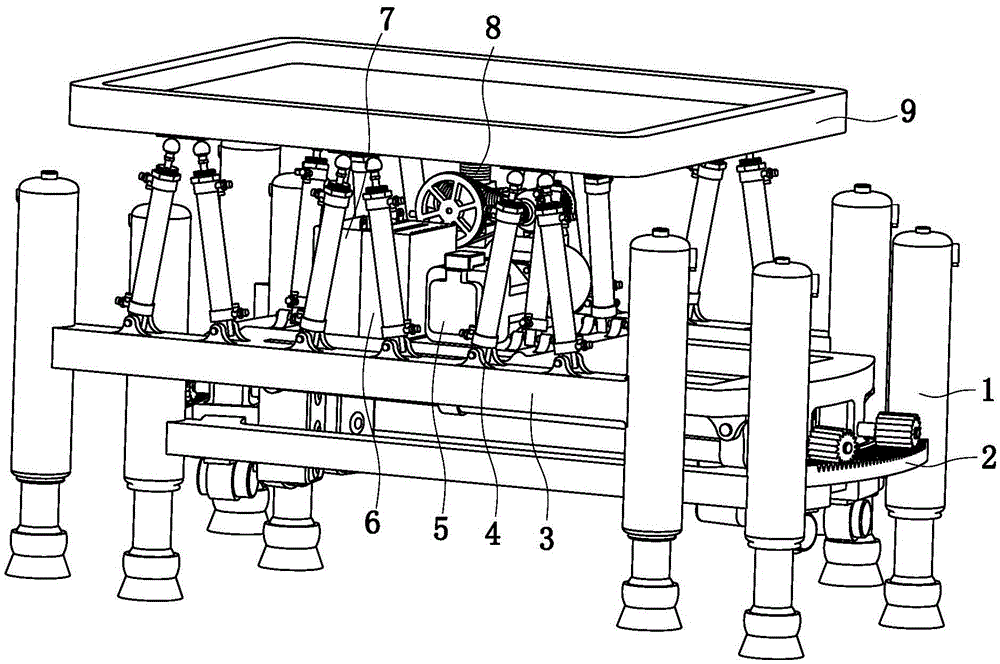
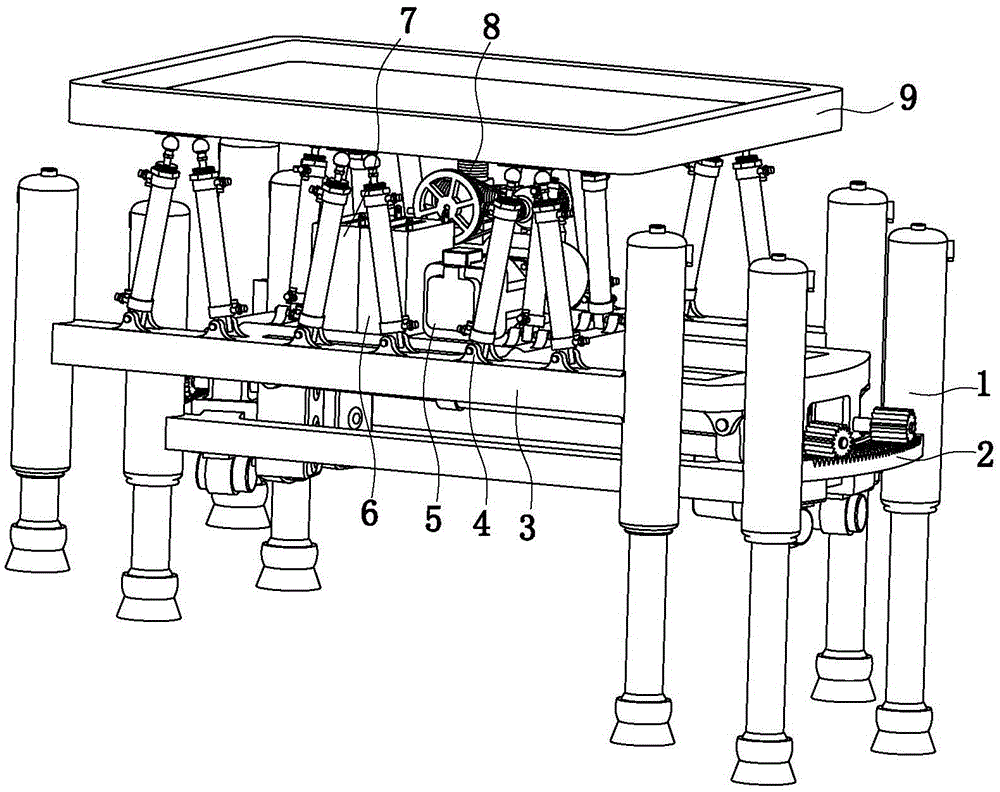
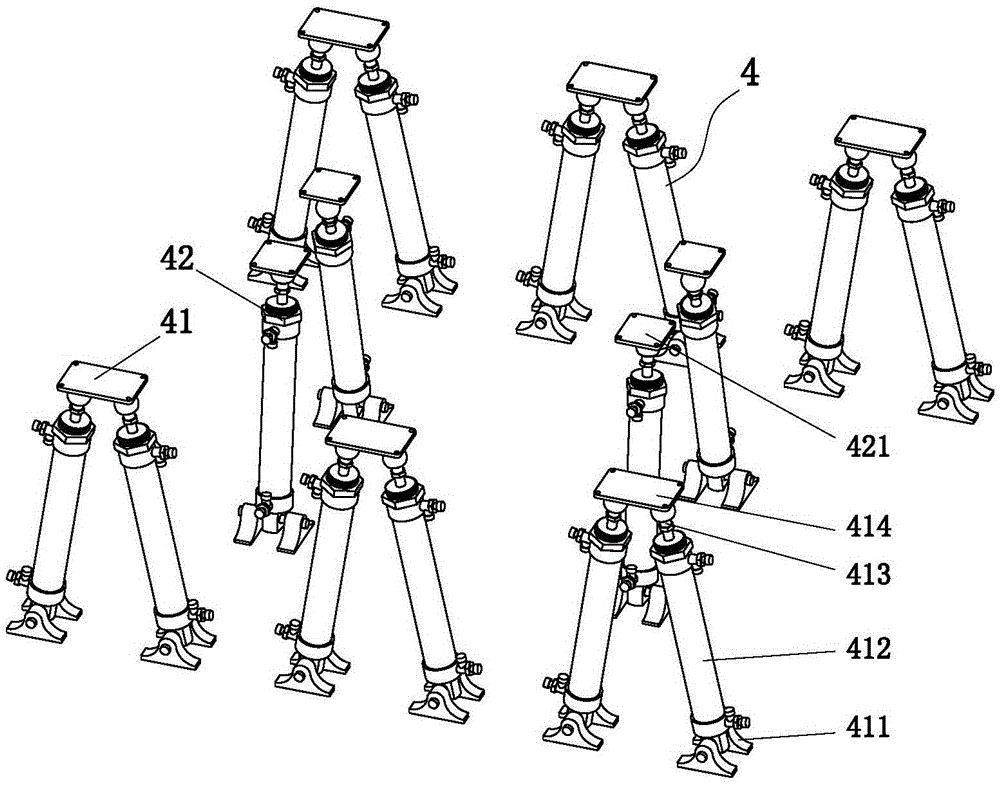
[0032] Such as figure 1 and figure 2 As shown, a complex road handling robot based on a parallel mechanism includes a first parallel mechanism 1, a propulsion device 2, a second parallel mechanism 3, a third parallel mechanism 4, a hydraulic pump 5, a controller 6, a battery 7, and an air pump 8 and the stage 9, the propulsion device 2 is located above the first parallel mechanism 1, the second parallel mechanism 3 and the propulsion device 2 are connected through a moving pair, the first parallel mechanism 1 and the second parallel mechanism 3. Under the action of the propulsion device 2, the functions of steering and walking can be realized. The third parallel mechanism 4 is installed above the second parallel mechanism 3. The third parallel m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More