Independent steering driving wheel based on hub motor
An in-wheel motor, independent steering technology, applied in electric steering mechanism, steering mechanism, power steering mechanism, etc., can solve problems such as instability, high noise, bumps, etc., achieve the effect of small size, small space, and avoid bumps and vibrations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
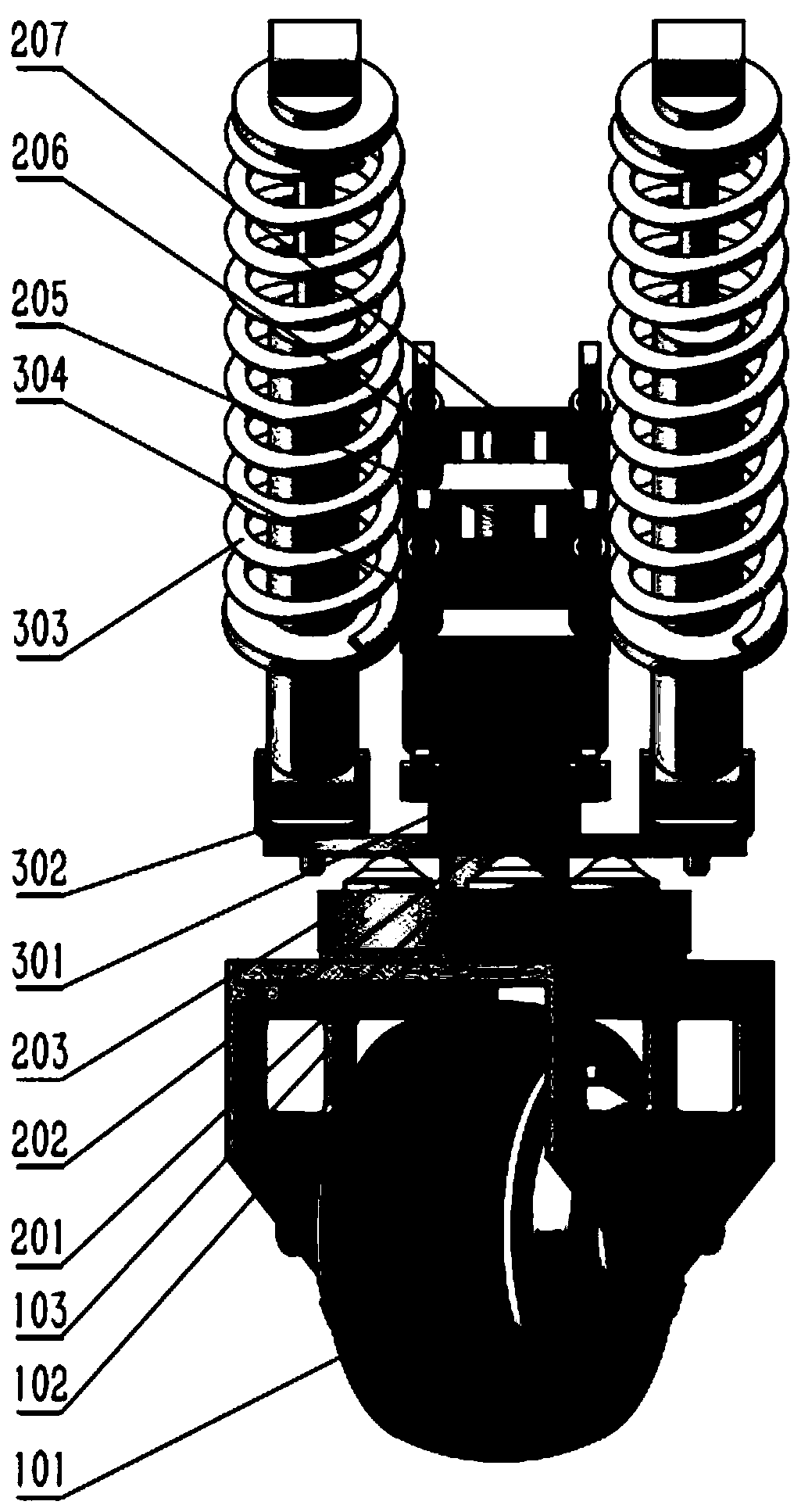
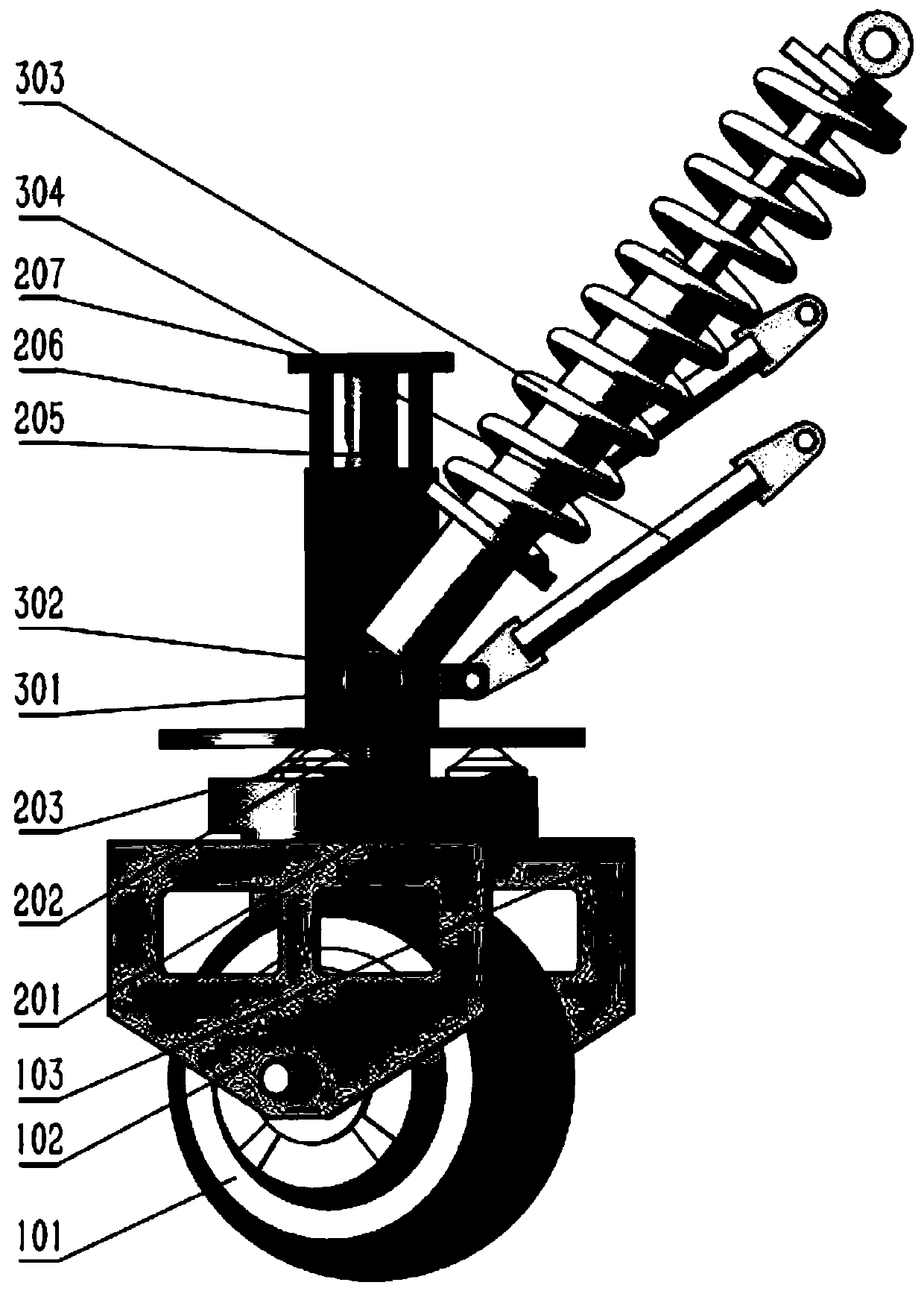
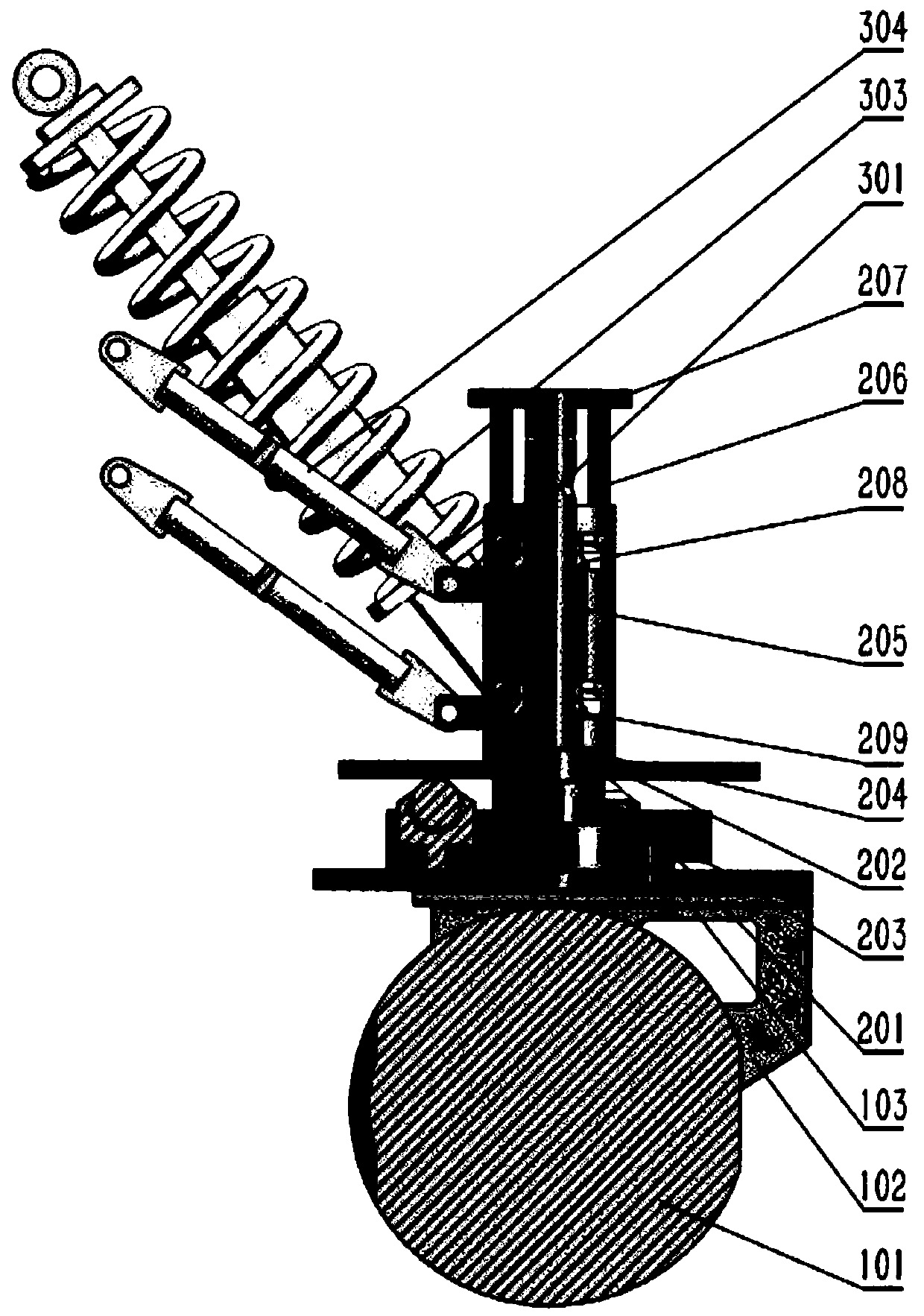
[0017] according to Figure 1-Figure 4 , the independently driven steering wheel applied to the omnidirectional mobile robot designed by the present invention is composed of 1 traveling mechanism, 2 force receiving mechanisms, and 3 shock absorbing mechanisms.
[0018] Among the above-mentioned mechanisms, the traveling mechanism includes 101 hub motor wheel, 102 hub frame A and 103 hub frame B; Optical shaft, 207 upper flanges, 208 upper contact bearings, 209 lower angular contact bearings; the damping mechanism includes 301 swing arm hinge connections, 302 shock absorber hinge connections, 303 shock absorbers, 304 swing arms.
[0019] The composition and connection relationship of each part is as follows: the 101 hub motor wheel is fixed on the motor frame composed of 102 hub frame A and 103 hub frame B through nuts. Screw fixed. There is a blind hole on the surface of the 201 pillow block and an internal thread, and the end of the 203 universal wheel is threaded, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More