

Multi-connecting rod bionic mechanical leg and crawling robot
A technology of bionic mechanical legs and multi-links, which is applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems of unbalanced force on the joints and complex mechanisms, and achieve the advantages of reducing the transmission angle, good bionic effect, and reducing bending Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
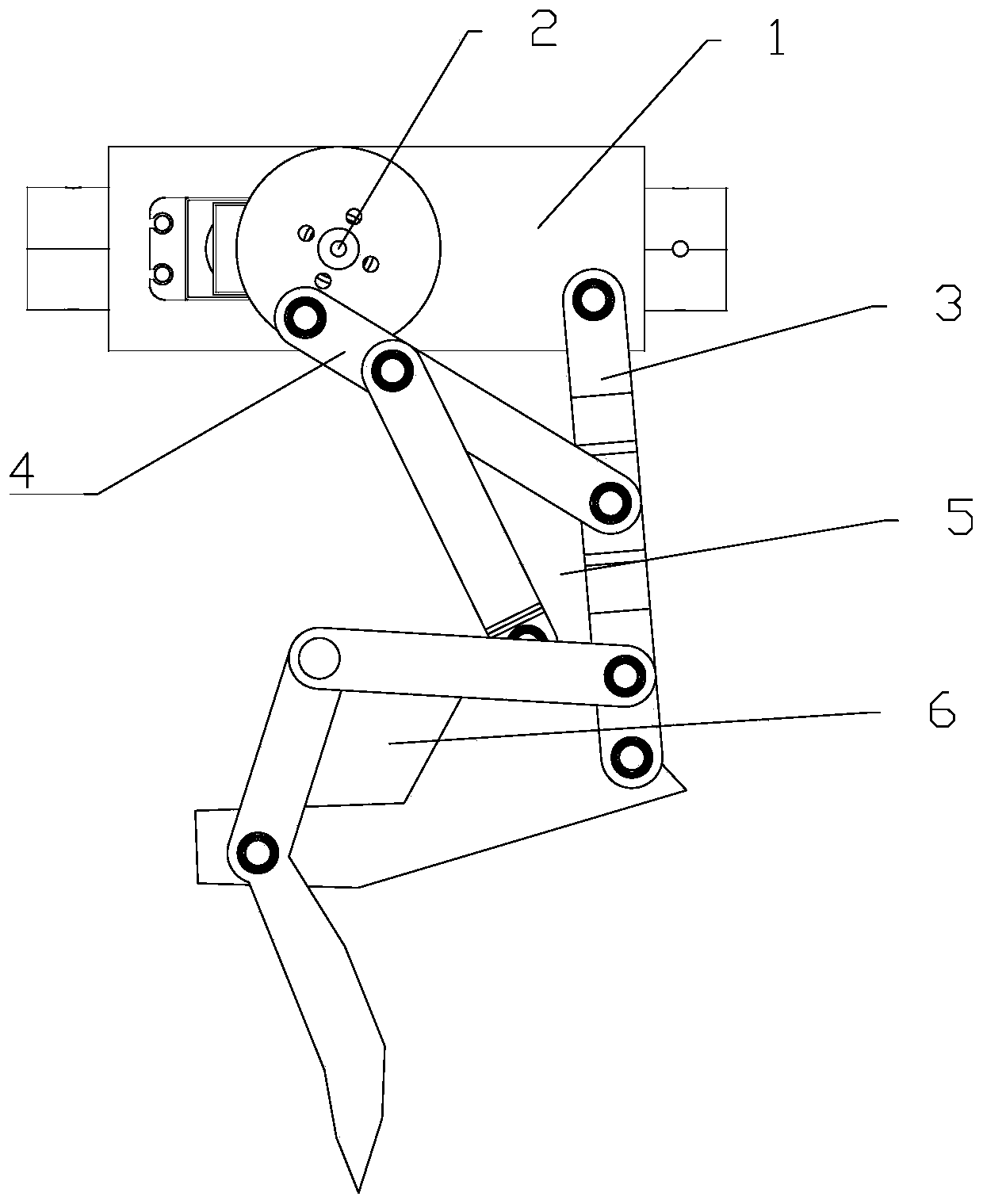
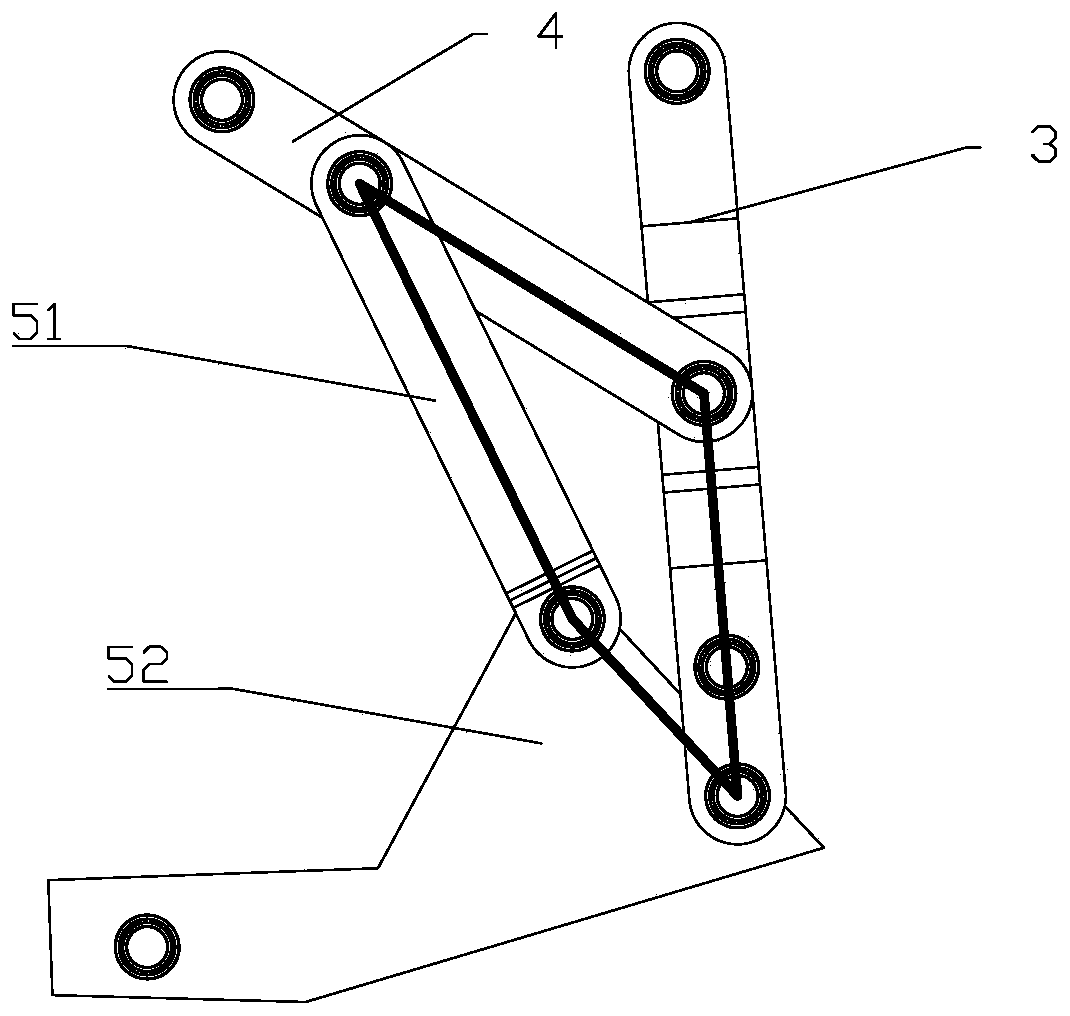
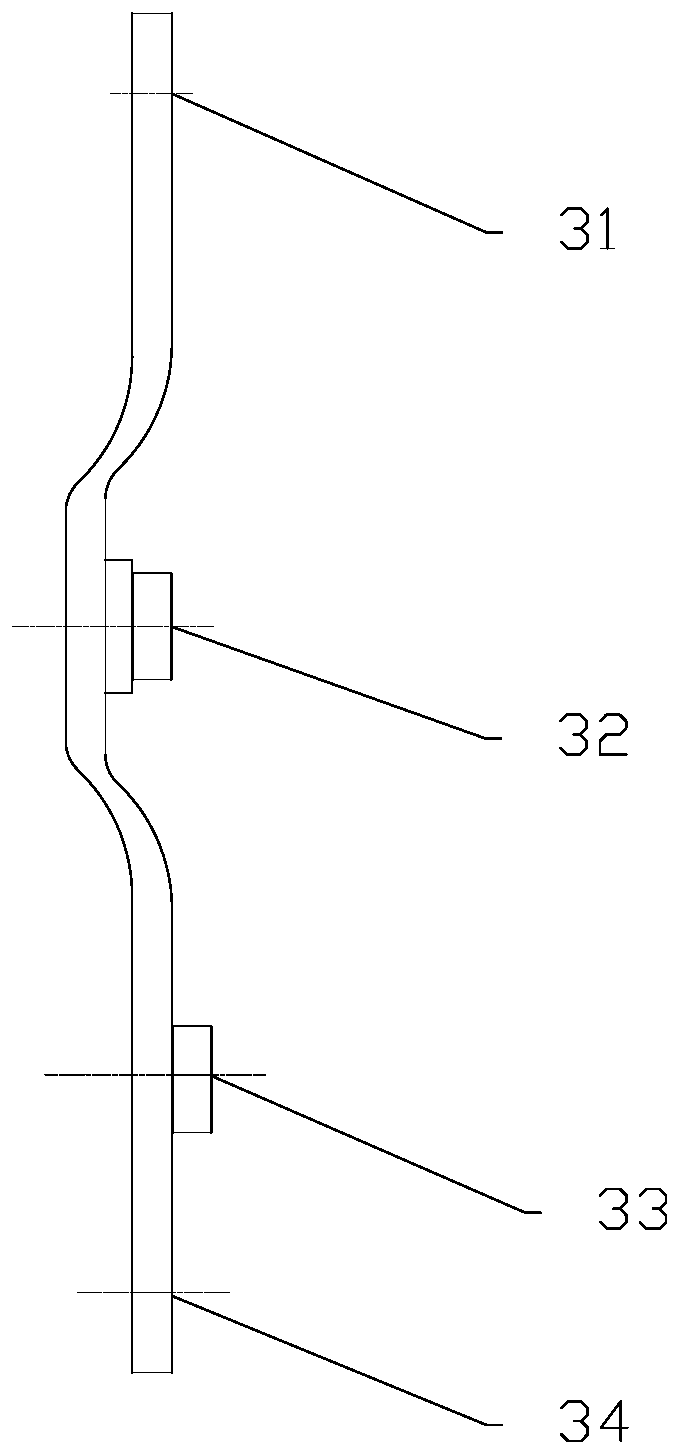
[0018] Such as figure 1 As shown, the described multi-link bionic mechanical leg includes a base 1, a driving part 2, a rocker 3, a first connecting rod 4, an intermediate four-bar linkage 5 and an output four-bar linkage 6; the driving part 2 includes The steering gear and the steering gear disc installed on the output shaft of the steering gear, the steering gear is fixedly arranged on the base body 1, the end of the rocker 3 is connected to the base body 1 in rotation, and the eccentricity of one end of the first connecting rod 4 and the steering gear disc The positions are hinged, and the other end of the first connecting rod 4 is rotationally connected with the middle part of the rocking bar 3; the base 1, the steering wheel, the rocking bar 3 and the first connecting rod 4 constitute a crank rocker mechanism, and the base 1 is The frame is fixed, the steering wheel is a crank; the two known moving rods of the middle four-bar linkage mechanism 5 are the rocker 3 and the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More