

Gripping device having bernoulli gripping unit and vacuum gripping unit
A technology of grabbing devices and grabbing units, applied in the direction of transportation and packaging, manufacturing tools, chucks, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
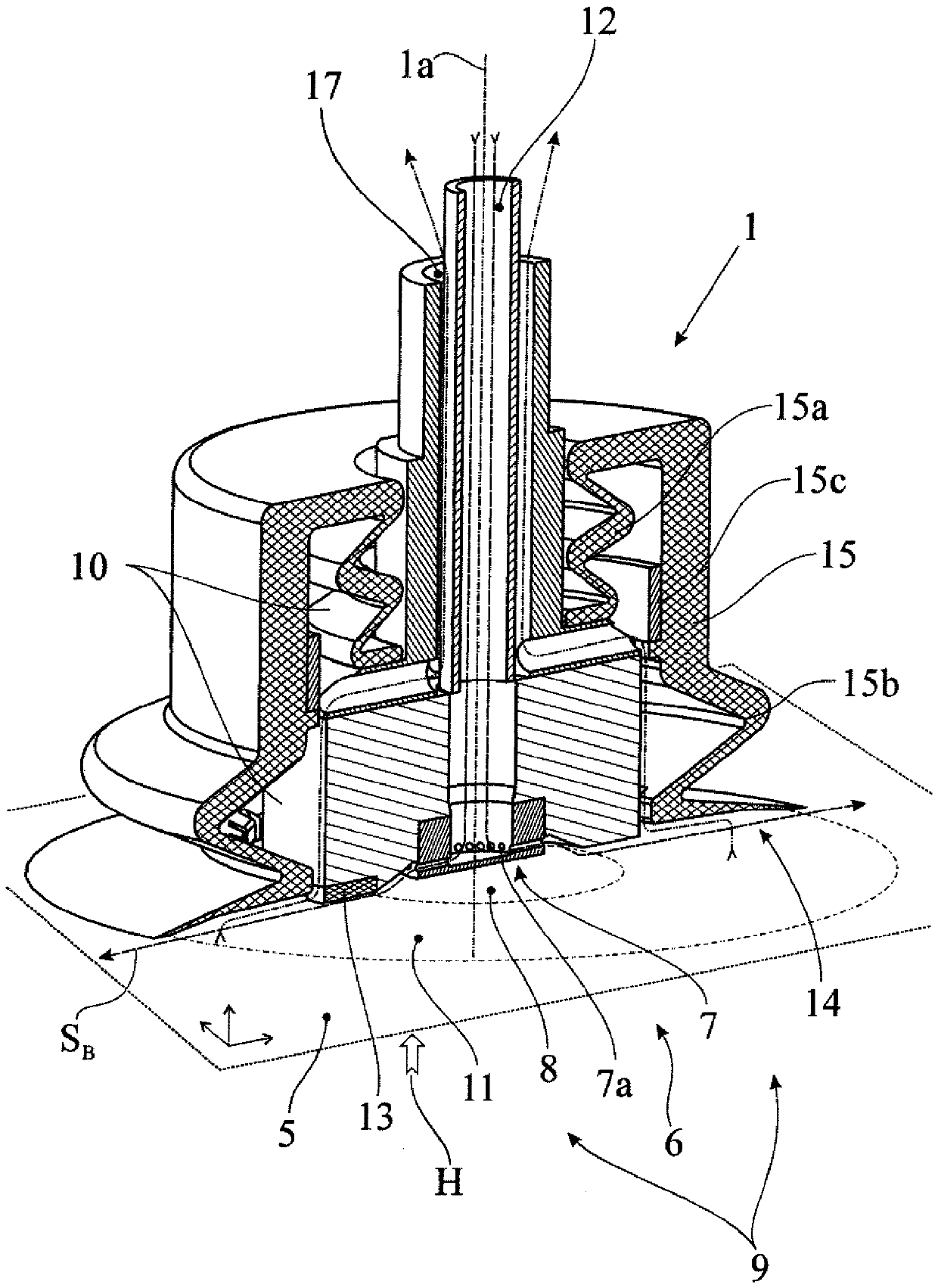
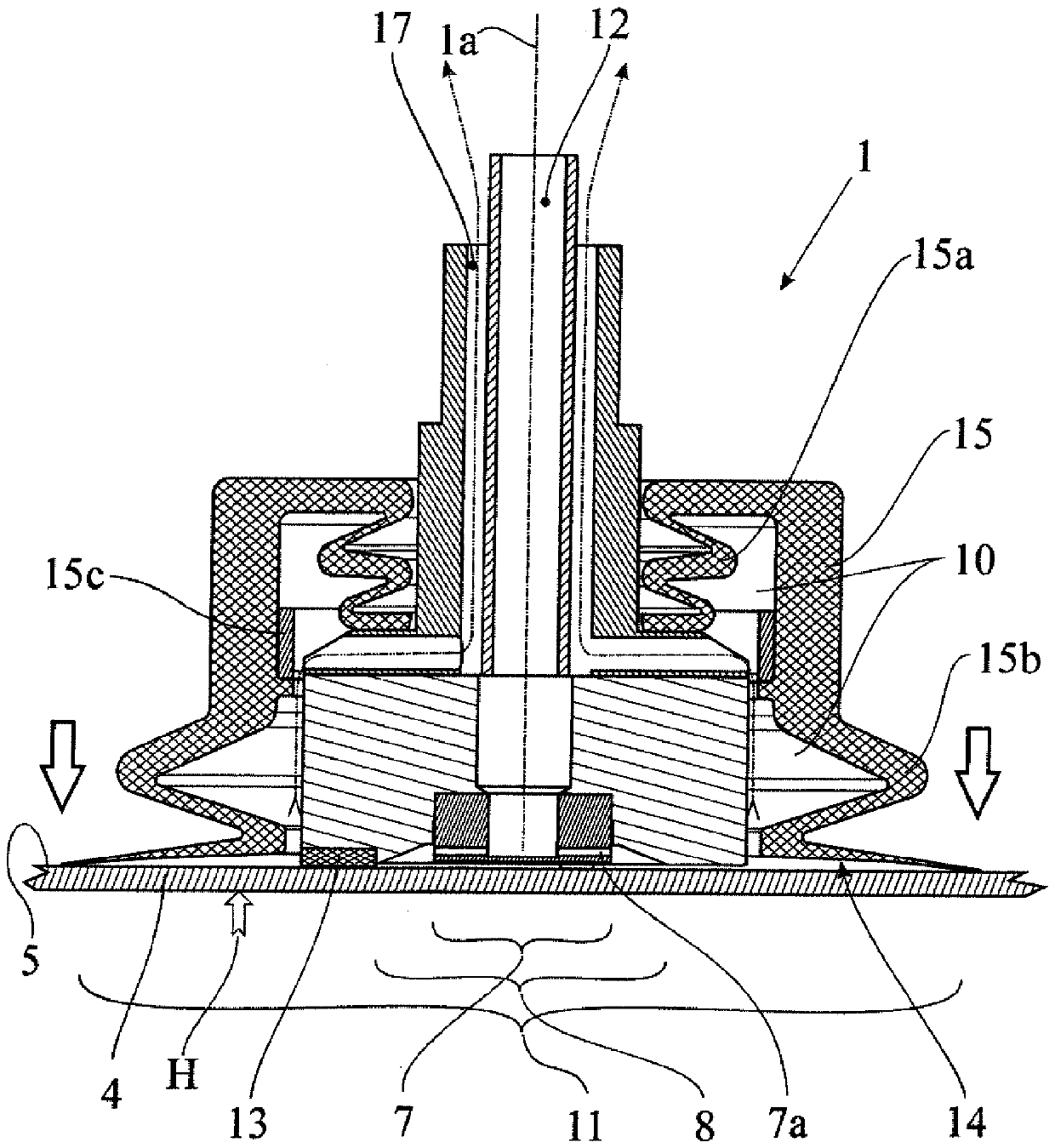
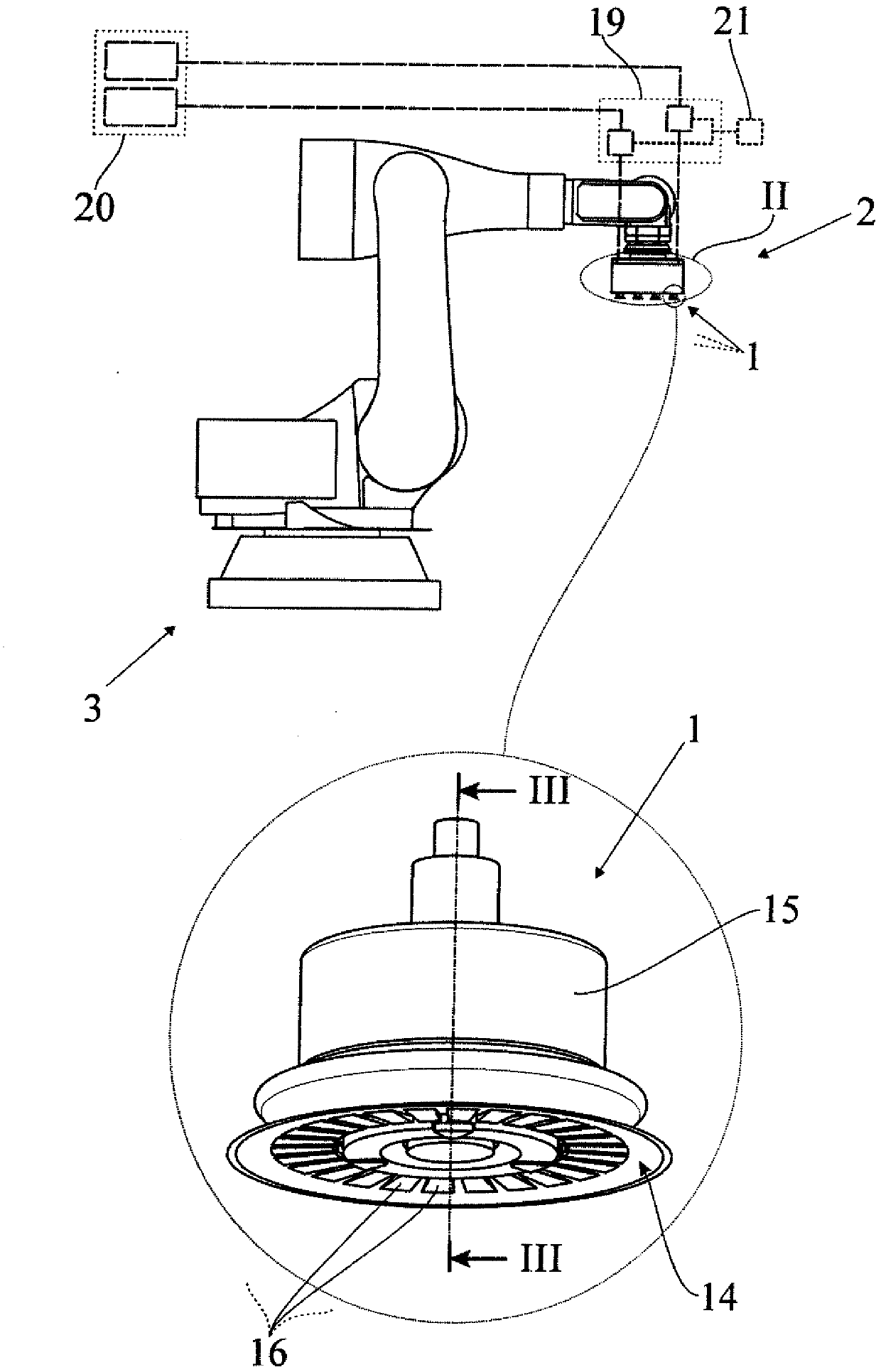
[0027] exist figure 1 A gripping device 1 for an end effector 2 of a manipulator 3 for handling a workpiece 4 on a workpiece surface 5 of the workpiece is shown in FIG. With the proposed gripping device 1 it is possible in principle to handle every workpiece 4 which can be gripped on its workpiece surface 5 by means of a static vacuum. The workpiece 4 can be any workpiece with a corresponding workpiece surface 5 .
[0028] A dimensionally stable or also flexible workpiece 4 can be held by the gripping device 1 . These soft materials can be, in particular, aluminum sheets or foils and / or fiber materials, in particular fiber mats. The fiber material may be a dry fiber material and / or a pre-impregnated fiber material.
[0029] According to the proposal, the gripping device 1 has a Bernoulli gripping unit 6 . This Bernoulli gripping unit 6 has an outflow unit 7 for leading the air flow from the Bernoulli gripping unit 6 between the gripping device 1 and the workpiece surface 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More