

Humanoid five-finger manipulator
A manipulator and five-finger technology, applied in the field of multi-finger anthropomorphic manipulators, can solve the problems of not being able to open four fingers together, slow response speed, and small load.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
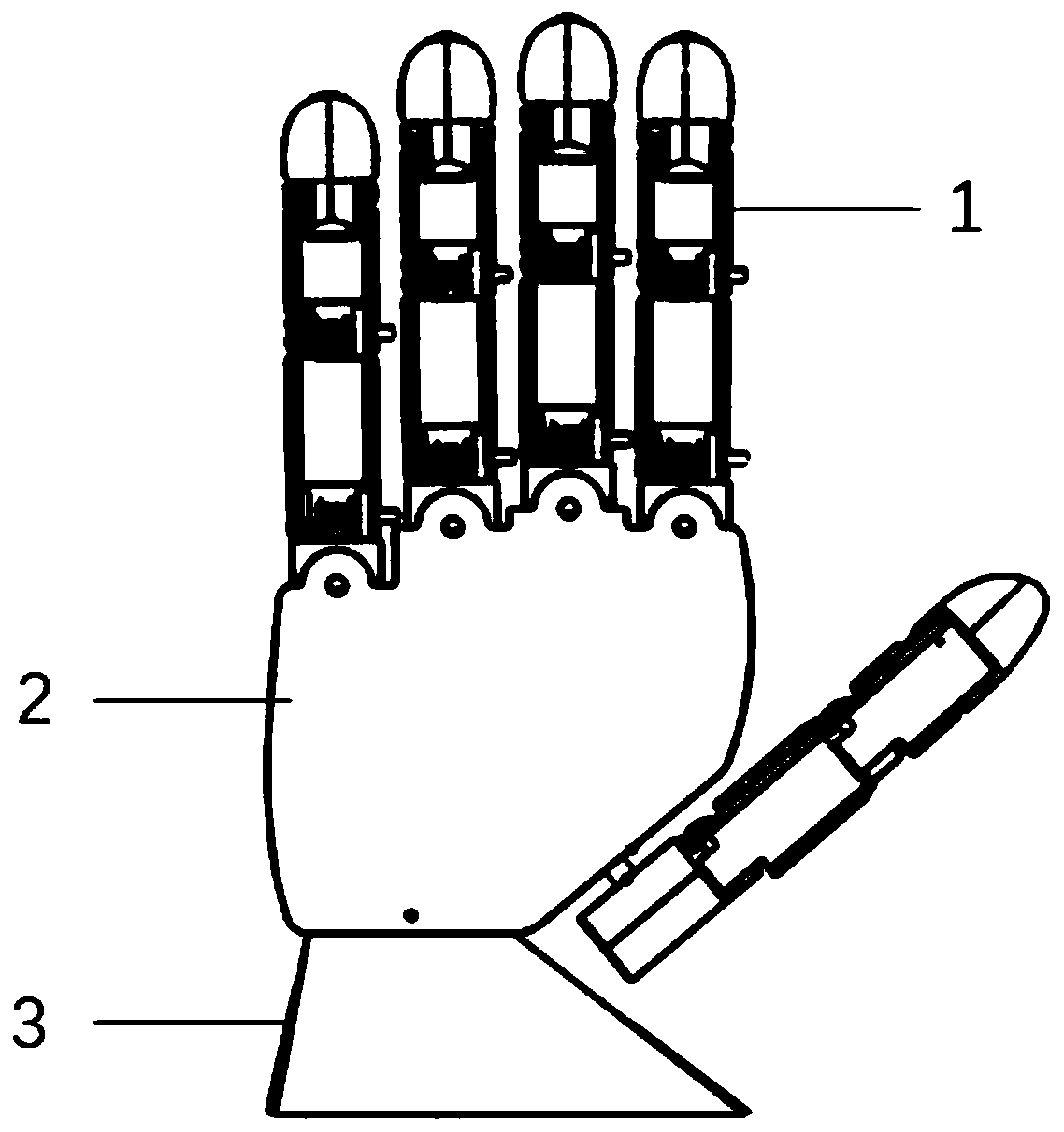
[0021] An anthropomorphic five-fingered manipulator, comprising a palm base 3, a palm and five fingers 1 connected to the palm. The five fingers are exactly the same, each finger has three joints, and it is characterized in that it also includes.
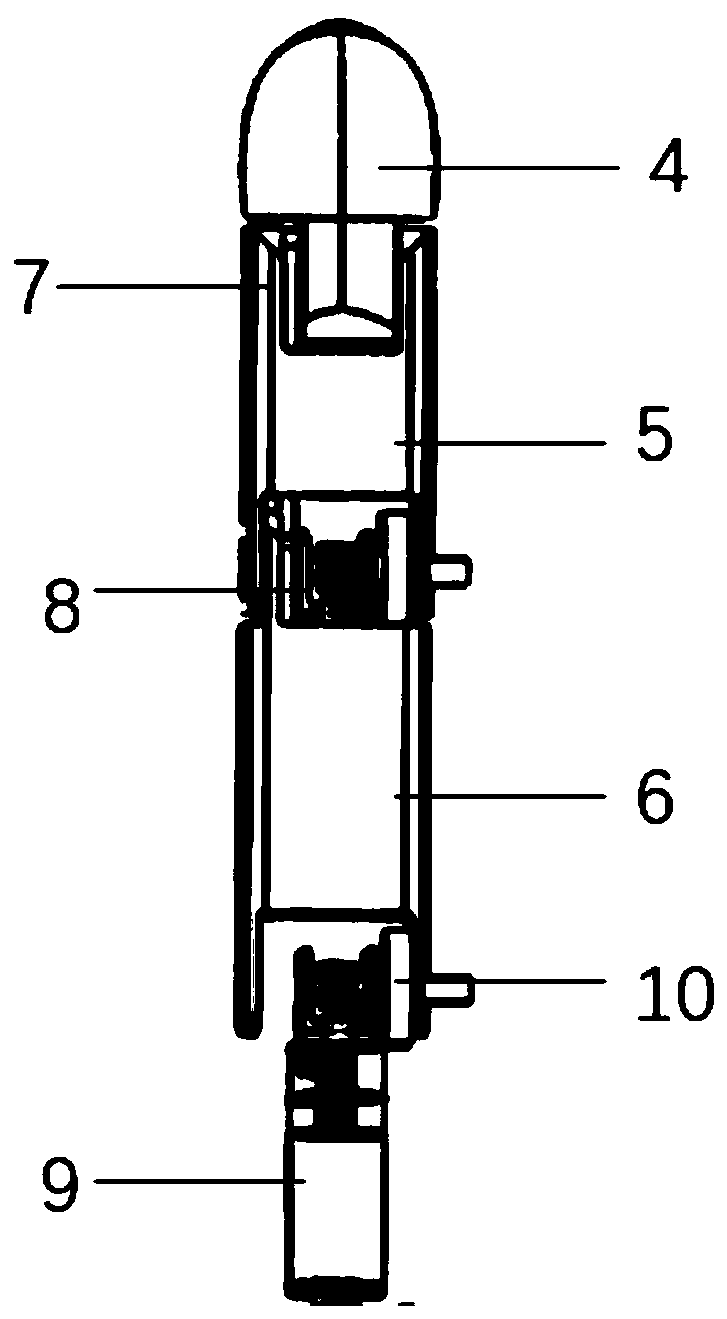
[0022] The fingers of the manipulator each have 3 joints. The knuckle joint and the middle knuckle are driven by the drive motor, so that the joint rotates around the rotation axis. The fingertip 4 and the middle finger 5 are connected by a connecting rod 7 to form a four-bar linkage, and the fingertip is driven by the middle finger. Complete the grasping motion of the fingers.
[0023] For the finger of the manipulator, an angle sensor 10 is installed on the rotation axis of the root joint and the middle finger joint.
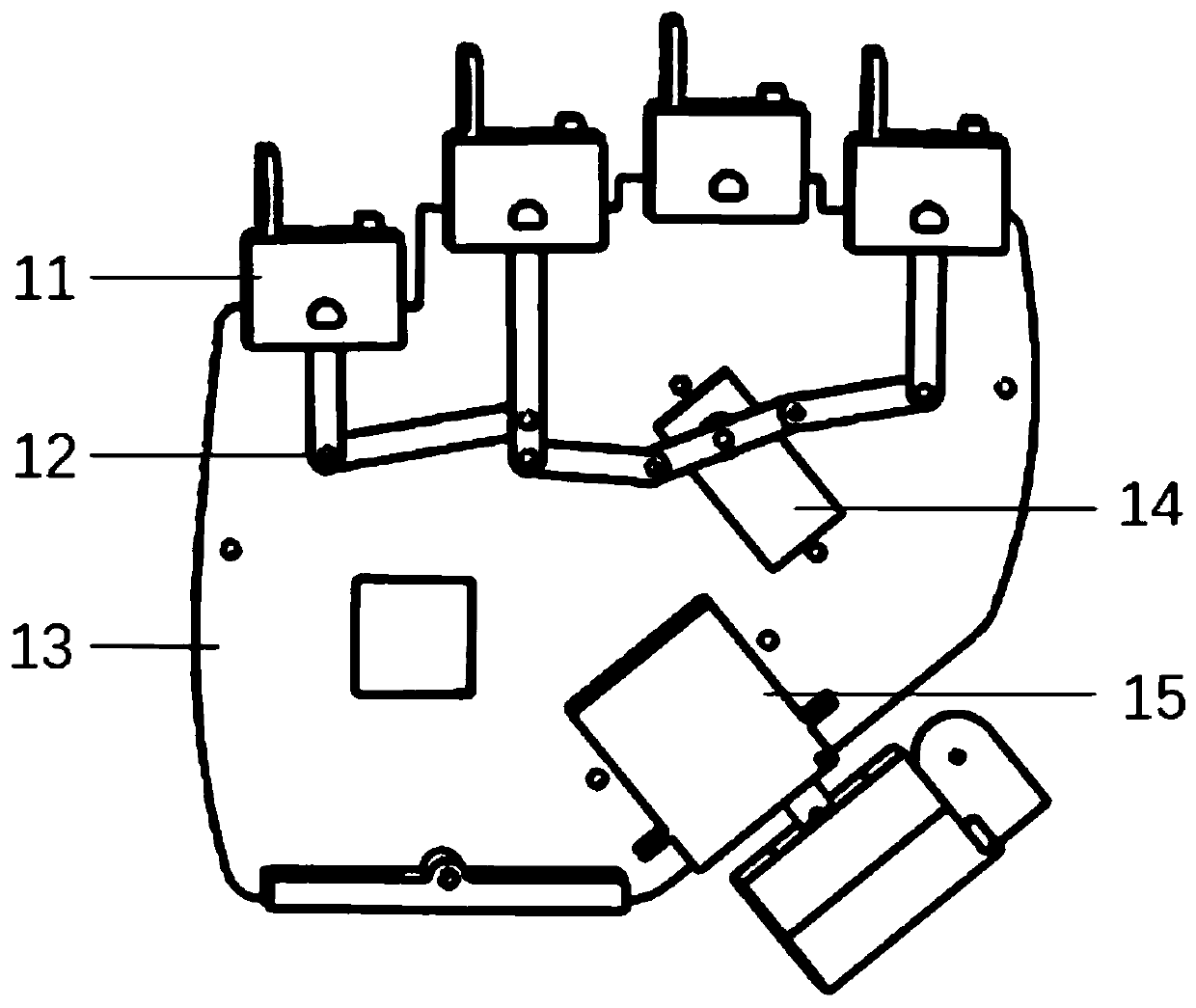
[0024] The thumb of the manipulator is additionally provided with a rotating motor on the finger base 11, so that the thumb can rotate in a plane perpendicular to the palm.
[0025] The driving motor of the manip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More