

Method, device, storage medium and electronic equipment for dividing polygonal plots
A technology of polygons and plots, applied in geographic information databases, data processing applications, predictions, etc., can solve problems such as non-convex polygon plot boundaries and obstacle boundaries that cannot be applied
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
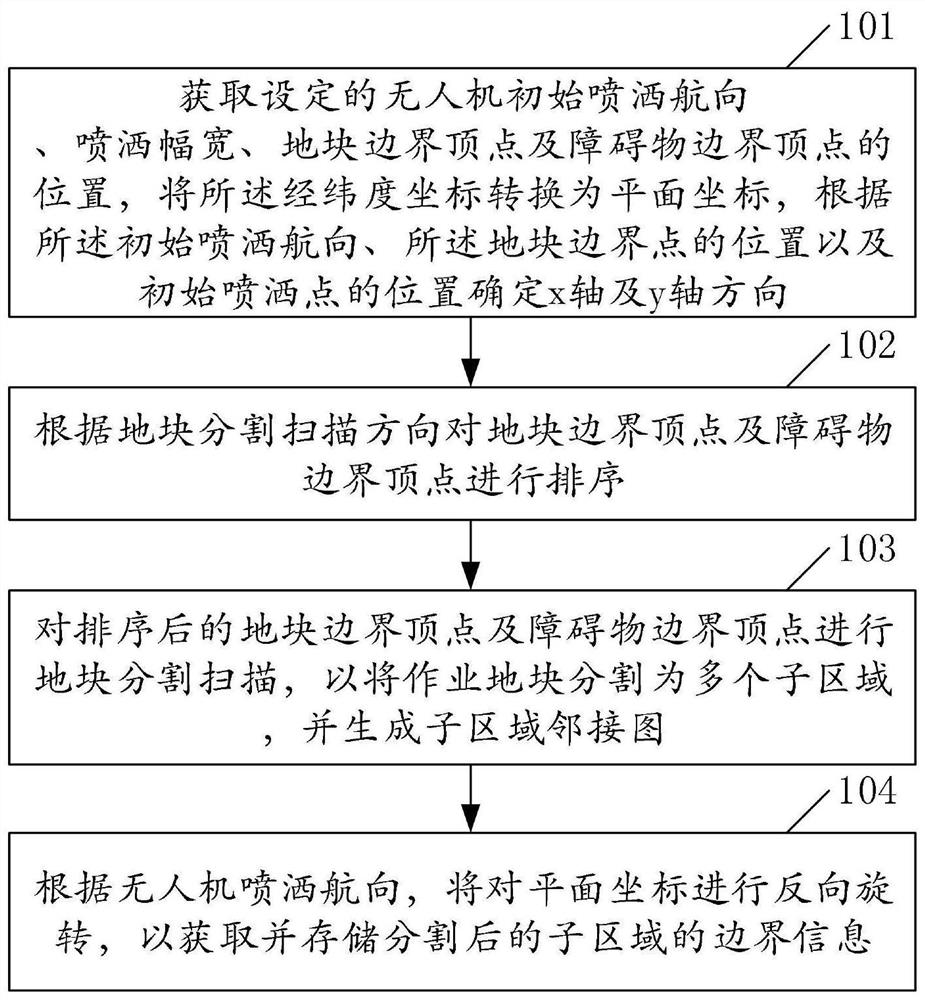
[0035] Embodiment 1 of the present invention provides a polygonal block segmentation method, such as figure 1 shown, including:
[0036] Step 101. Obtain the set drone's initial spraying heading, spraying width, position of plot boundary apex and obstacle boundary apex, convert the latitude and longitude coordinates into plane coordinates, according to the initial spraying heading, the ground The position of the block boundary point and the position of the initial spraying point determine the x-axis and y-axis directions;
[0037] Wherein, the initial spraying course is the positive direction of the x-axis; the spraying course can be changed during the spraying process. The two-dimensional coordinate plane can be customized. For example, the vertical upward direction in the plane can be the positive direction of the x-axis, and the y-axis can be the horizontal direction. In addition, the positive direction of the y-axis can be determined according to the location of the plot....
Embodiment 2
[0064] Embodiment 2 of the present invention may further include a preprocessing step before step 102 of Embodiment 1, wherein the preprocessing step includes at least one of the following:
[0065] 1. Determine whether the plot boundaries intersect. When the plot boundaries intersect, instruct the user to re-enter the latitude and longitude coordinates of the plot boundary vertices;
[0066] 2. Shrink the border vertices of the plot by a preset distance, and expand the border vertices of obstacles by a preset distance;
[0067] Among them, the retraction of the vertices of the boundary of the plot can prevent the drone from flying outside the boundary due to the error of the sampling point or the control error, causing danger; Into the obstacle, danger occurs.
[0068] 3. According to the obstacle boundary formed by the obstacle boundary vertices, judge whether the obstacles intersect. When there is an intersecting obstacle, select the outer boundary vertex of the intersecti...
Embodiment 3
[0072] Embodiment 3 of the present invention provides a polygonal plot segmentation device, such as Figure 10 shown, including:
[0073] The acquisition module 810 is used to obtain the set drone's initial spraying heading, spraying width, the position of the plot boundary apex and the obstacle boundary apex, convert the latitude and longitude coordinates into plane coordinates, according to the initial spraying heading, The position of the boundary point of the plot and the position of the initial spraying point determine the directions of the x-axis and the y-axis, wherein the initial spraying course is the positive direction of the x-axis;
[0074] The sorting module 820 is used to sort the plot boundary vertices and obstacle boundary vertices according to the plot segmentation scanning direction;
[0075] The segmentation scanning module 830 is used to perform segmentation scanning on the sorted plot boundary vertices and obstacle boundary vertices, so as to divide the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More