

Trackless obstacle-crossing intelligent inspection robot
An inspection robot and intelligent inspection technology, applied in the field of electronic information, can solve the problems of poor timeliness, high rate of missed detection and false detection, and poor accuracy, so as to avoid missed detection, reduce the problem of missed detection and false detection, and improve accuracy and the effect of timeliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
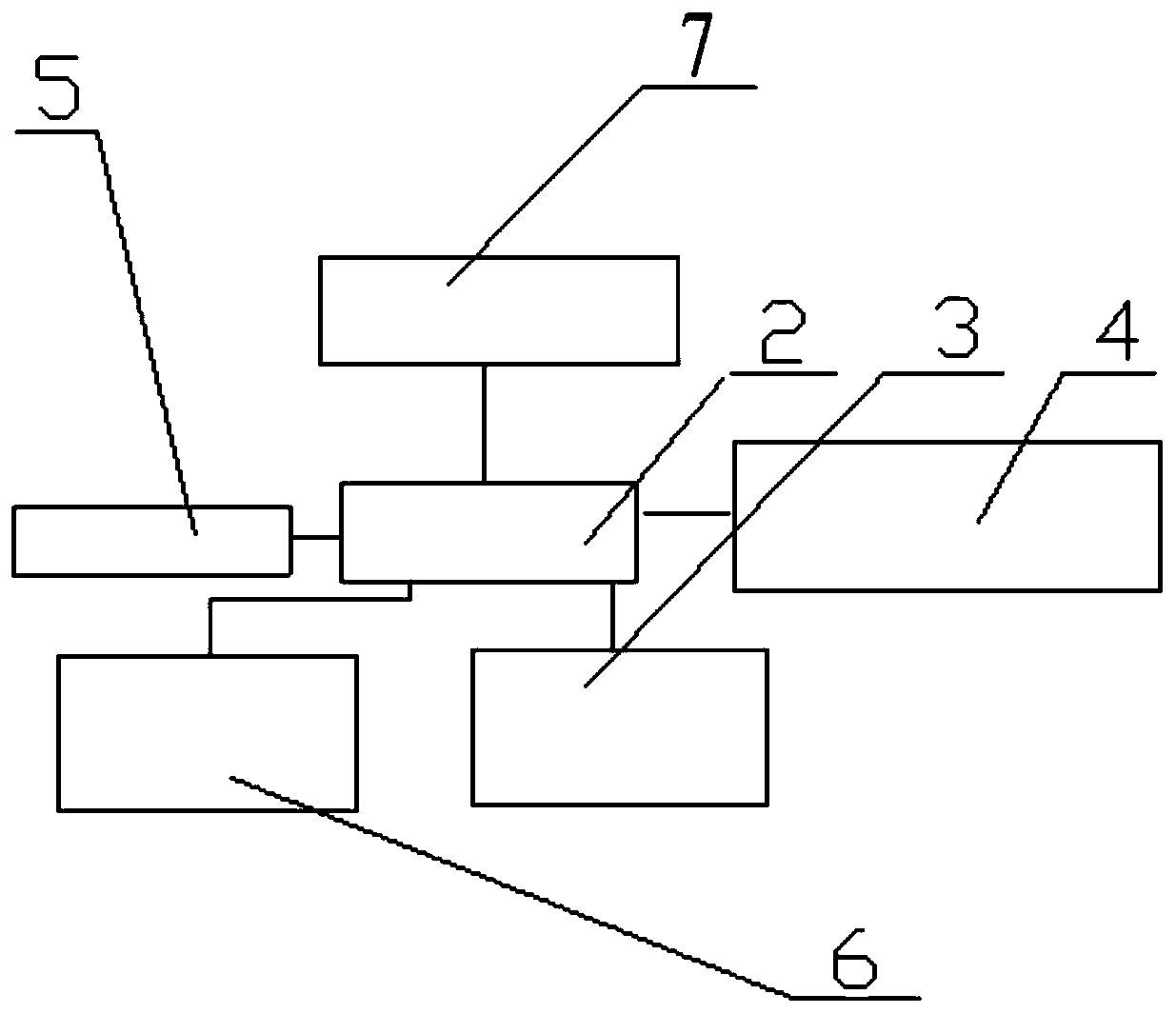
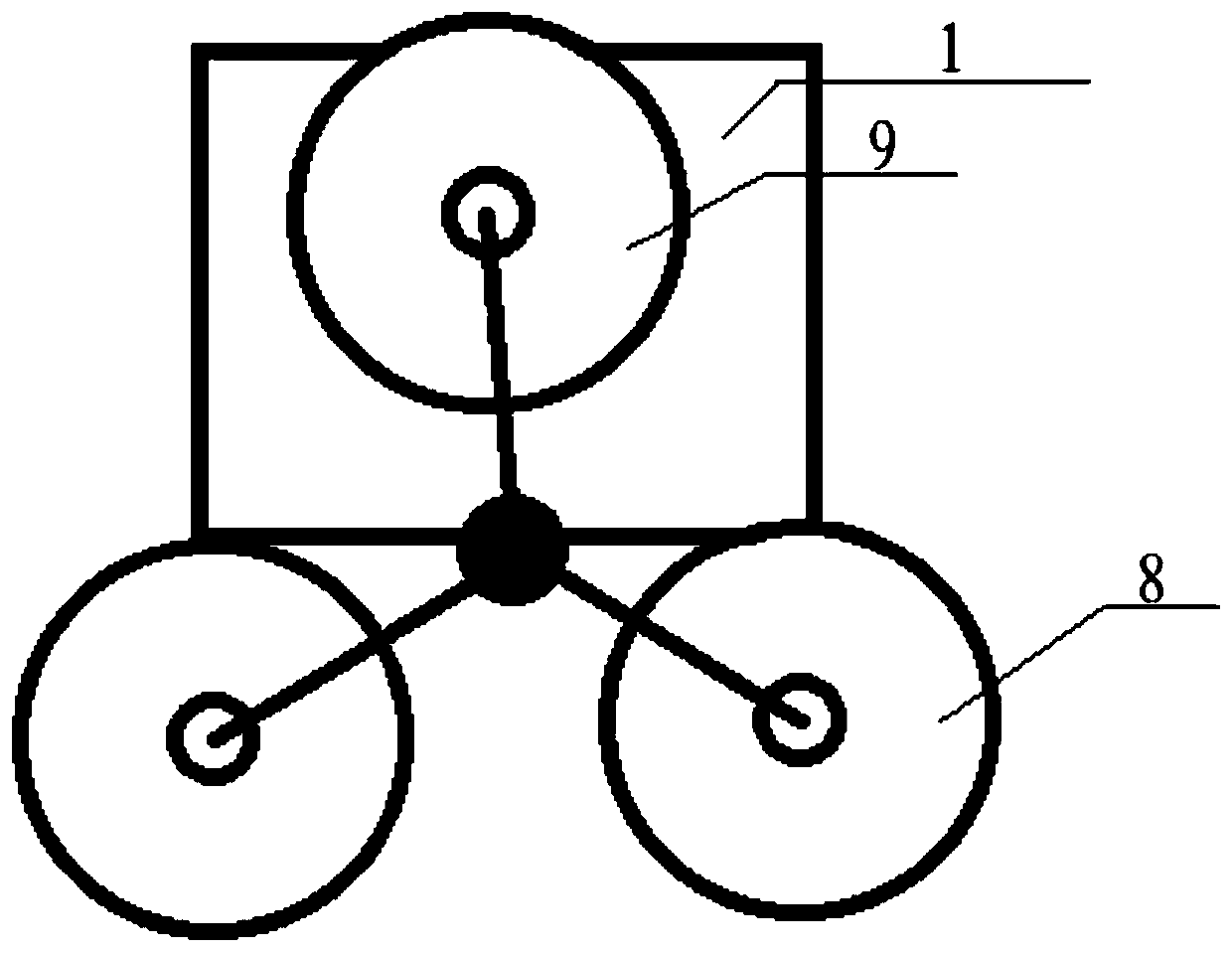
[0023] see figure 1 , figure 2 , a trackless obstacle-crossing intelligent inspection robot, comprising: an obstacle-breaking transmission device, an inspection robot main body 1 arranged above the obstacle-breaking transmission device, and a controller 2 fixedly arranged on the inspection robot main body 1, Infrared sensor 3, infrared camera 4, video acquisition device 5, level detection device 6 and wireless transceiver device 7, wherein, the left and right wheels of described obstacle-crossing transmission device are all made up of two landing wheels 8 and a suspension wheel 9, when encountering When reaching an obsta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More