

Intelligent vehicle path planning method based on bidirectional extension random trees
A path planning and smart car technology, applied to road network navigators, navigation, instruments, etc., can solve the problems of slow convergence speed, inability to use smart car path planning, path failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The specific embodiments of the present invention are described below so that those skilled in the art can understand the present invention, but it should be clear that the present invention is not limited to the scope of the specific embodiments. For those of ordinary skill in the art, as long as various changes Within the spirit and scope of the present invention defined and determined by the appended claims, these changes are obvious, and all inventions and creations using the concept of the present invention are included in the protection list.
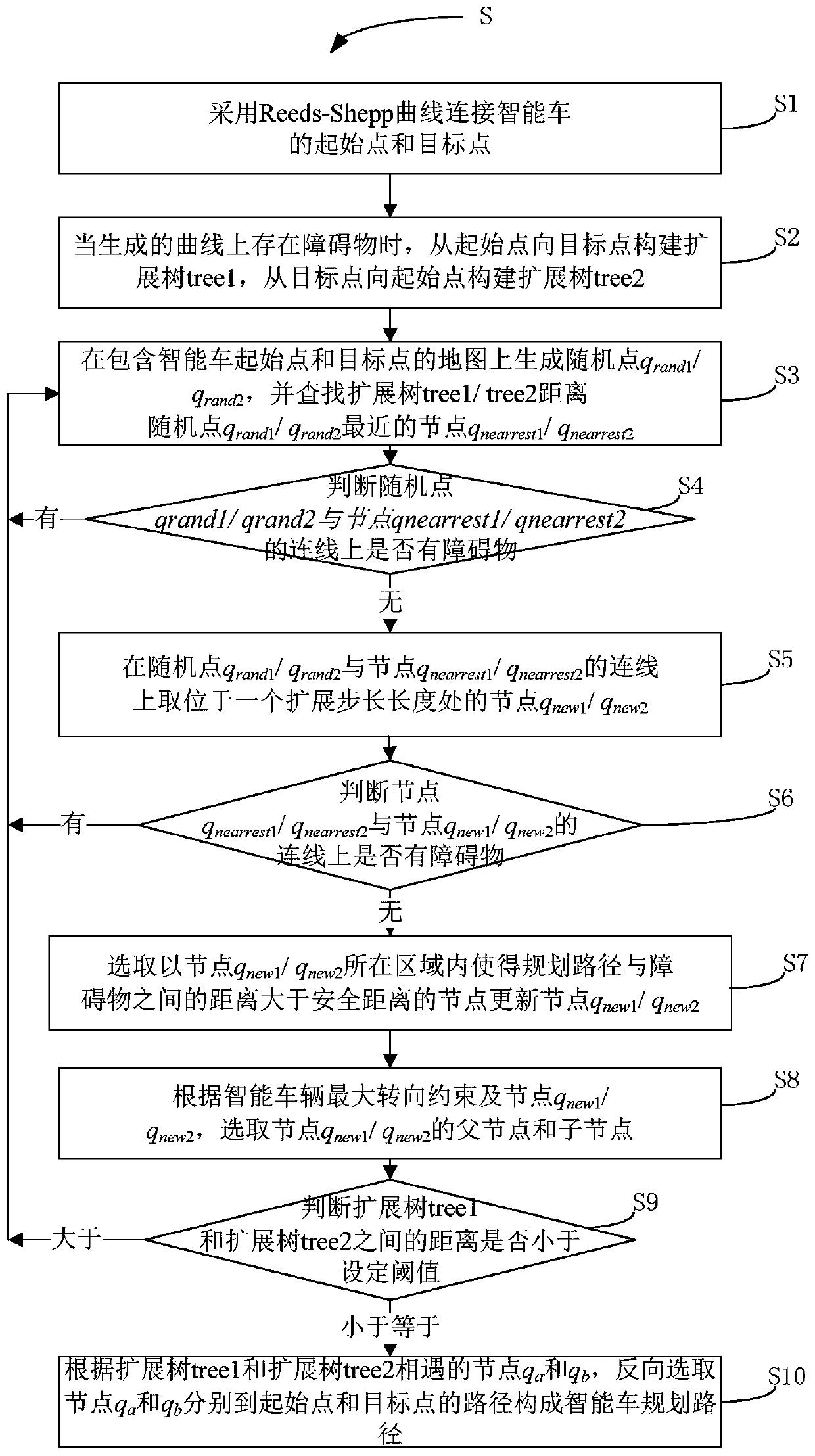
[0071] refer to figure 1 , figure 1 Shows the flow chart of the intelligent vehicle path planning method based on bidirectional extended random tree; as figure 1 As shown, the method S includes steps S1 to S10.
[0072] In step S1, use the Reeds-Shepp curve to connect the starting point and the target point of the smart car; for details, see figure 2 , the lighter and thinner black path in the figure is the path generat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More