A portable photovoltaic cleaning robot
A cleaning robot and robot technology, applied in the mechanical field, can solve problems such as shadow occlusion, difficult management, and inability to clean frequently
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
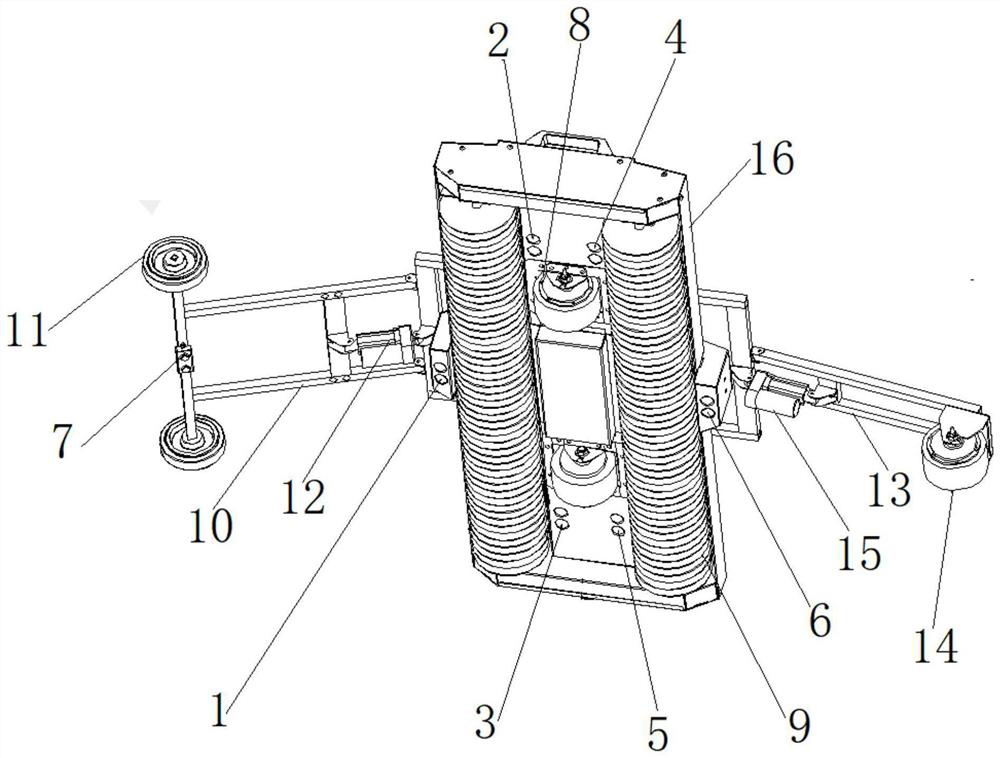
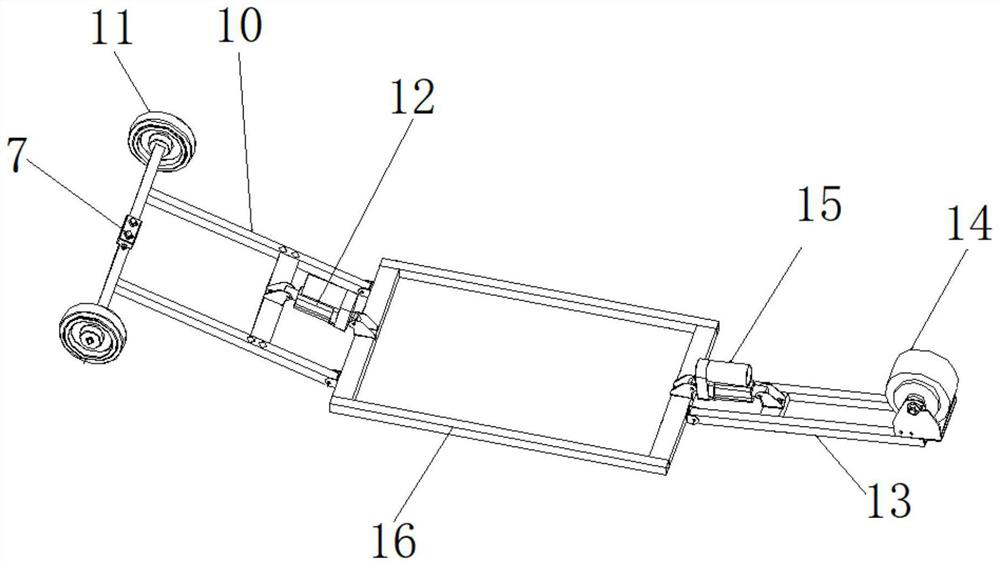
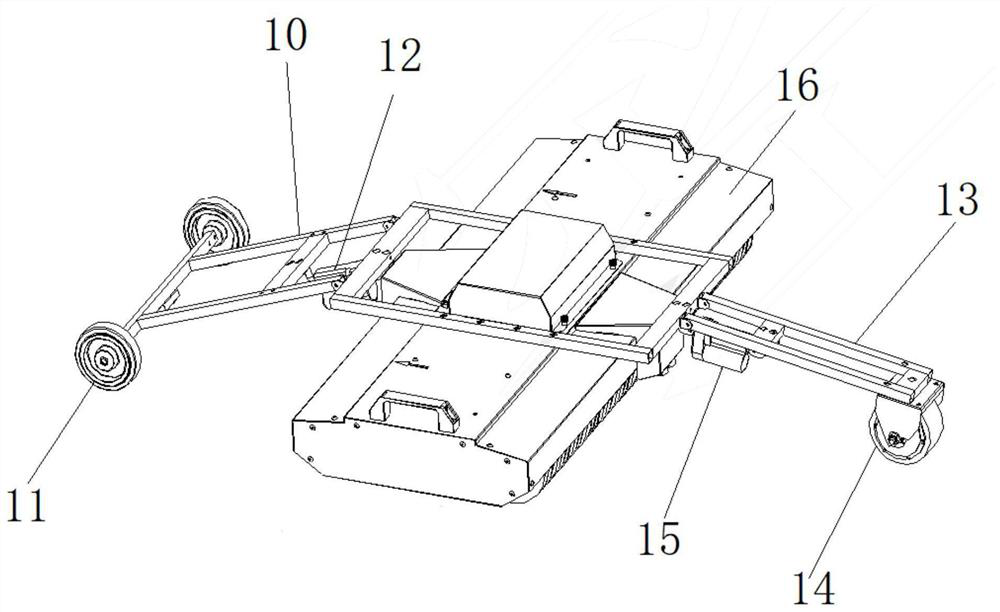
[0041] Such as Figure 1~4 As shown, a portable photovoltaic cleaning robot includes a cleaning robot, and the cleaning robot includes a robot frame 16. Two brush rollers 9 arranged side by side are arranged on the bottom of the robot frame, and two brush rollers are arranged between the two brush rollers. A first hub motor 8; a front auxiliary arm 10 is installed on the front of the robot frame, and a first telescopic device 12 for adjusting the rotation angle of the front auxiliary arm is installed on the front auxiliary arm, and an idler is installed on both sides of the front auxiliary arm. Wheel 11; a rear auxiliary arm 13 is installed on the rear portion of the robot frame, and a second telescopic device 15 for adjusting the angle of rotation of the rear auxiliary arm is installed on the rear auxiliary arm, and a second wheel hub motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com