

Pepper spraying robot and control method thereof
A control method, technology of robots, applied in the direction of devices, applications, animal husbandry, etc. to capture or kill insects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be further described below in conjunction with accompanying drawing.
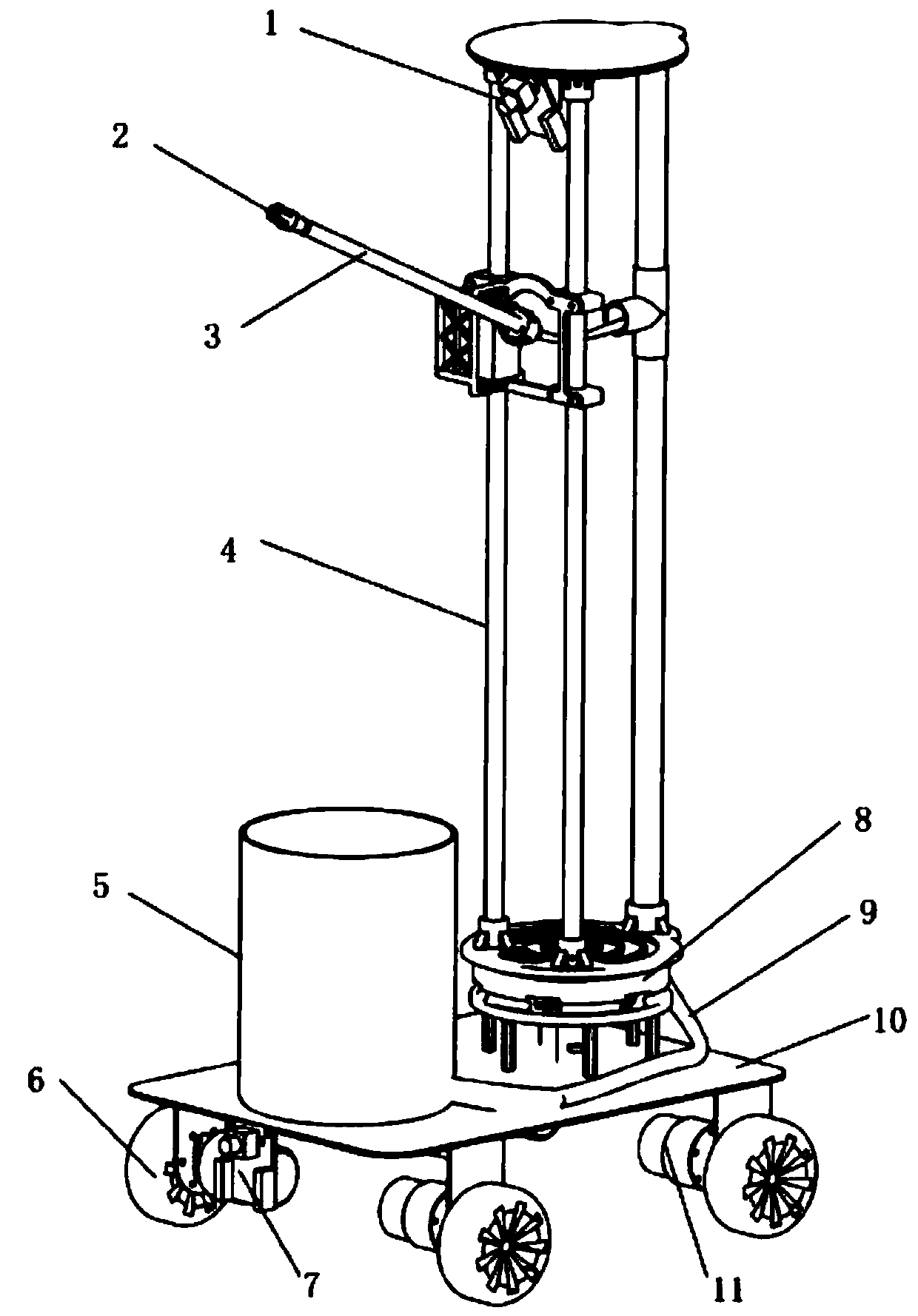
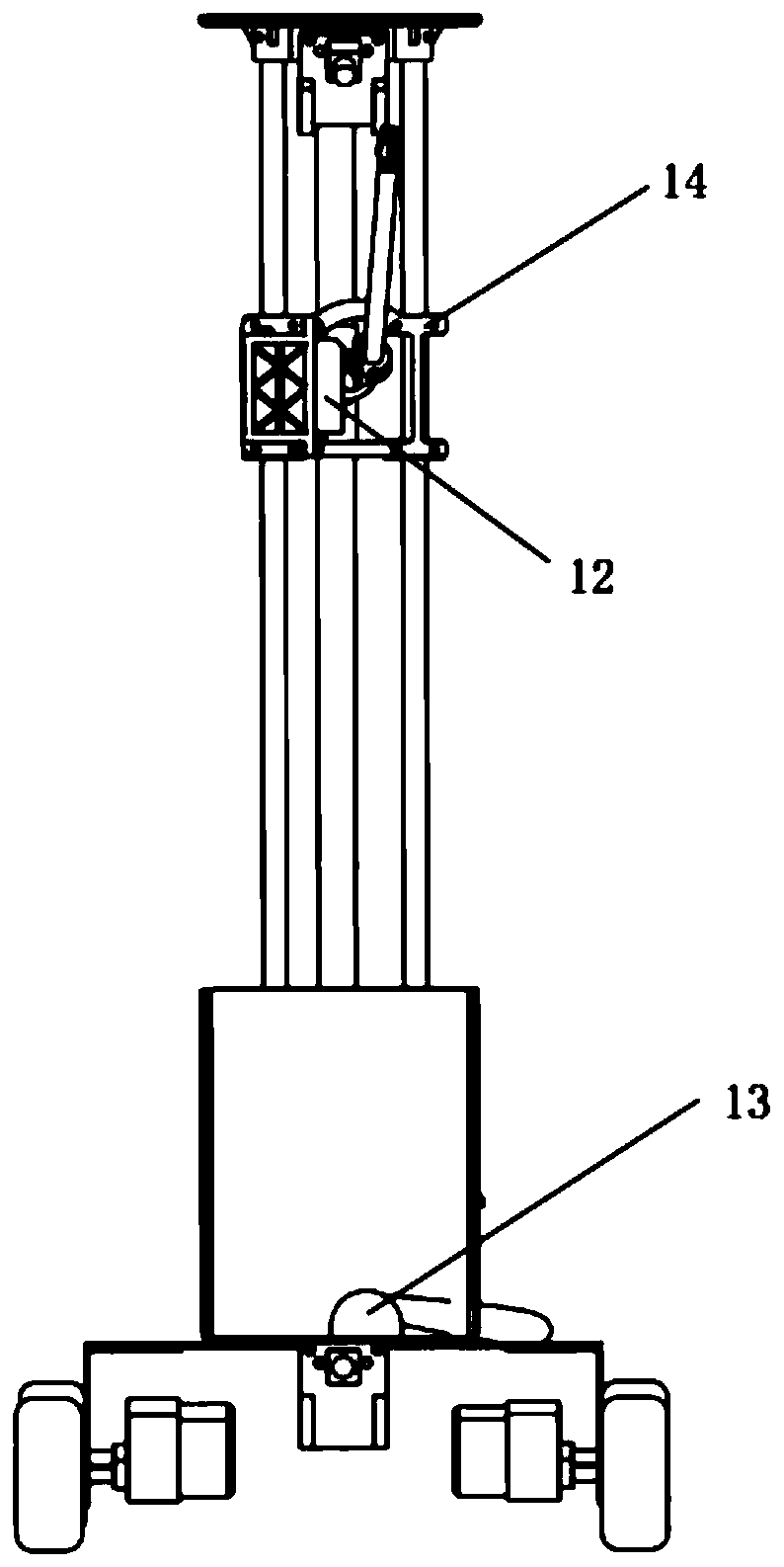
[0082] Such as figure 1 Shown, a kind of pepper spraying robot of the present invention comprises traveling mechanism, connecting mechanism, spraying mechanism and control circuit.
[0083] In this example, if figure 1 As shown, the traveling mechanism includes a chassis 10, four driving wheels 6, four DC motors 11 and four rotational speed counters 19, the driving wheels 6 are fixedly connected to the chassis 10 through a fixed frame, and the four DC motors 11 are connected to the chassis 10 respectively. The four driving wheels 6 are connected in one-to-one correspondence, and the four driving wheels 6 move at a differential speed when the pepper spraying robot turns. The speed counter 19 is used to detect the speed of each drive wheel 6 and sends it to the control circuit. The four speed counters 19 are respectively arranged on the output shafts of the four DC motors 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More