

Fire source positioning method and system based on SLAM technology and image identification
A technology of image recognition and positioning method, which is applied in the direction of radio wave measurement system, electromagnetic wave reradiation, and the control of finding targets. The effect of eliminating errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
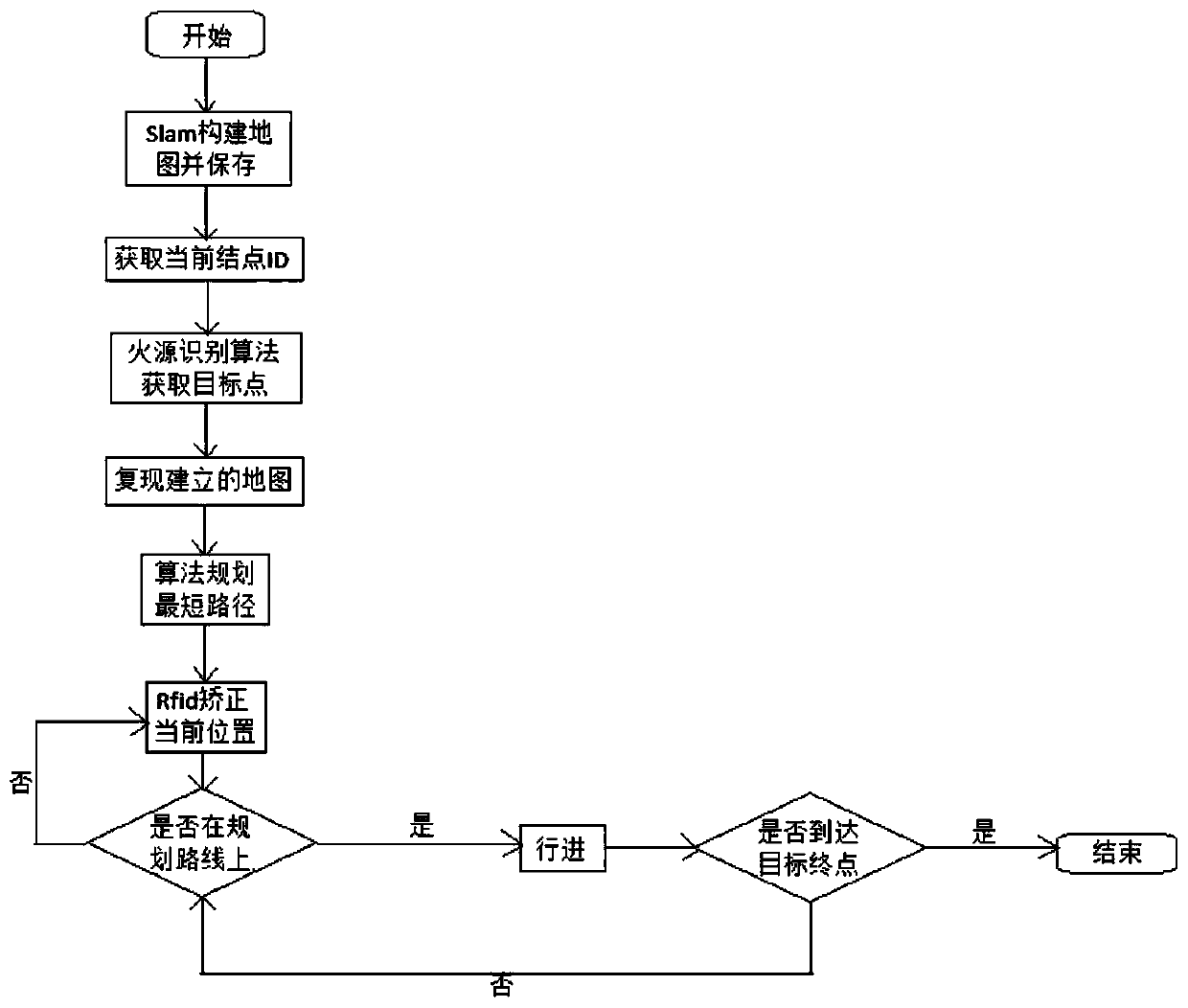
[0061] Embodiment 1 of the present invention: a kind of fire location method (can be implemented under ROS platform) based on SLAM technology and image recognition, such as image 3 shown, including the following steps:
[0062] S1. The data returned by the autonomous mobile robot through the lidar is combined with the SLAM algorithm to build a real-time map and save it; specifically, it can include: the data topic released by the autonomous mobile robot using the lidar subscribed by the ROS platform, the mileage data returned by the robot chassis, and the robot control system. After the configured coordinate relationship, the current posture of the car body and the surrounding environment information are obtained through the SLAM-GMAPPING algorithm; the host computer sends a movement command to control the robot to move accordingly, thereby creating a complete map;
[0063] S2, the robot moves autonomously based on the established real-time map, and uses the camera to capture...
Embodiment 2
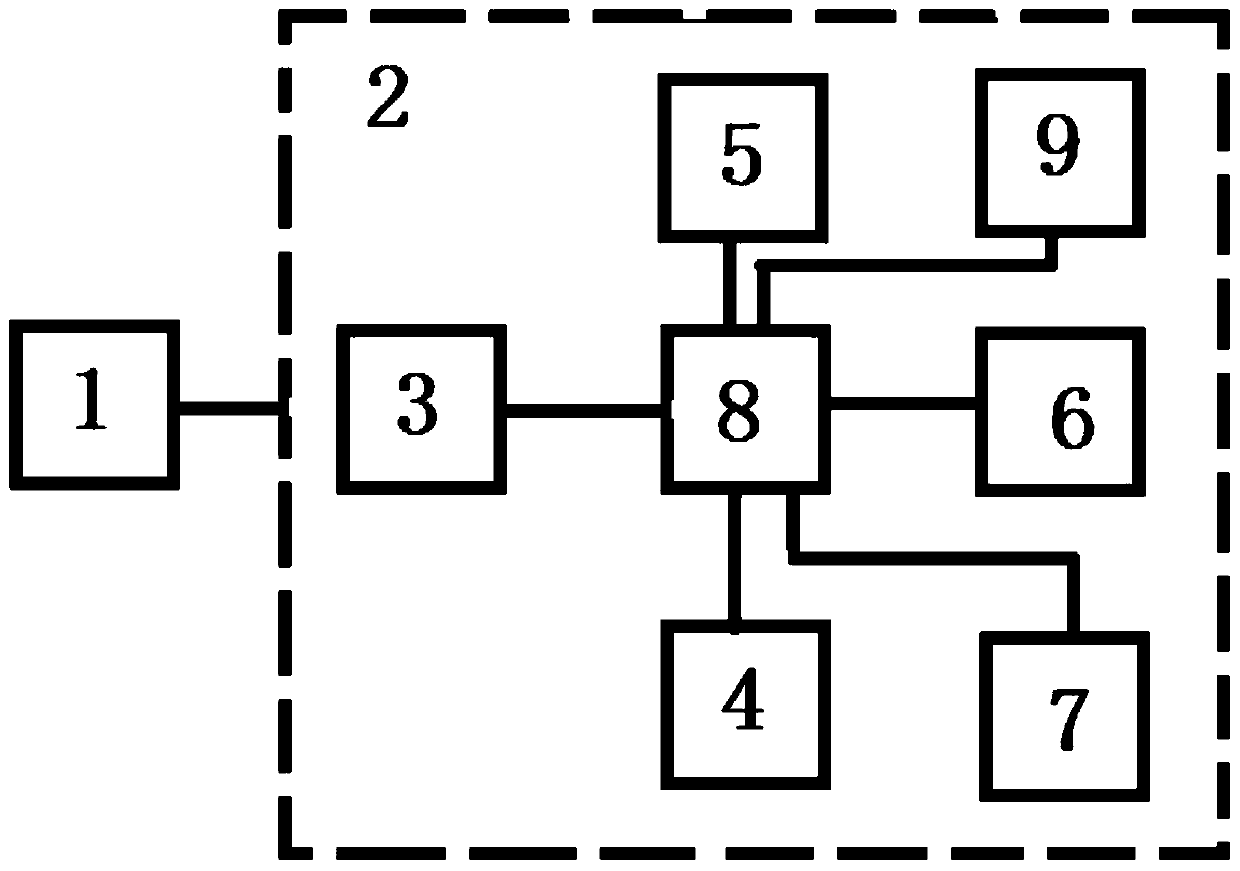
[0086] The fire source locating system is composed of three parts: an autonomous mobile robot 2, a host computer 1 platform and its communication peripherals. During specific implementation, in order to adapt to different ground environments, the autonomous mobile robot 2 may be a crawler robot (also called a crawler vehicle). A plurality of shock wheel sets are installed on the left and right sides of the robot body, and the shock wheel sets are used to ensure the safety of the connection of the components on the robot body. The tracked vehicle includes a temperature sensor 6, a smoke sensor 7, and a processor 8, which can independently complete fire extinguishing tasks, collect fire source information for processing and then send it to the host computer 1, and receive control instructions from the latter. The upper computer 1 platform and its communication peripherals realize the communication with the crawler robot, complete the remote PC control robot and process the data ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More