

Dynamic sliding mode attitude tracking control method and system for flexible spacecraft
A flexible spacecraft, tracking control technology, applied in the field of flexible spacecraft, can solve the problems of high-order sliding mode control law design limitations, weakening the robustness of sliding mode control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
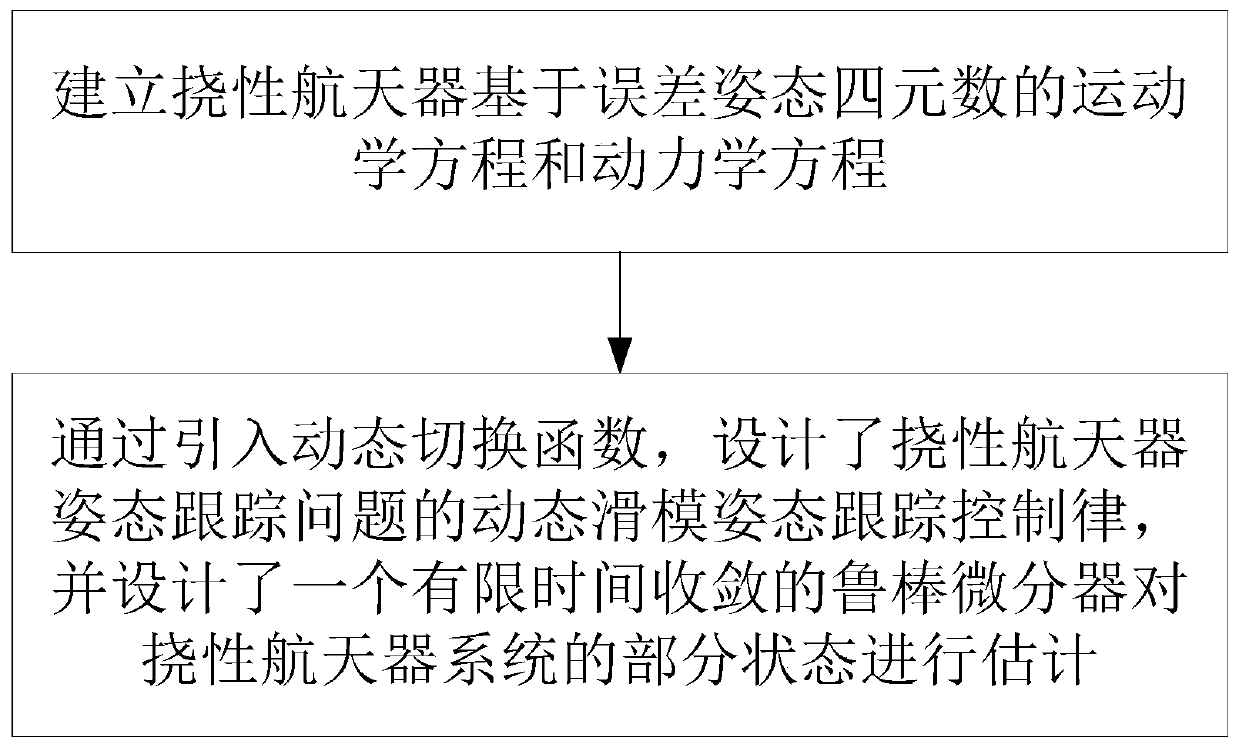
[0060] Such as figure 1 As shown, the present invention discloses a method for dynamic sliding mode attitude tracking control of a flexible spacecraft, comprising the following steps:
[0061] Step S1: Establish the kinematic equation and dynamic equation of the flexible spacecraft based on the error attitude quaternion;
[0062] Step S2: By introducing a dynamic switching function, a dynamic sliding mode attitude tracking control law for the flexible spacecraft attitude tracking problem is designed, and a robust differentiator with finite time convergence is designed to estimate the partial state of the flexible spacecraft system .
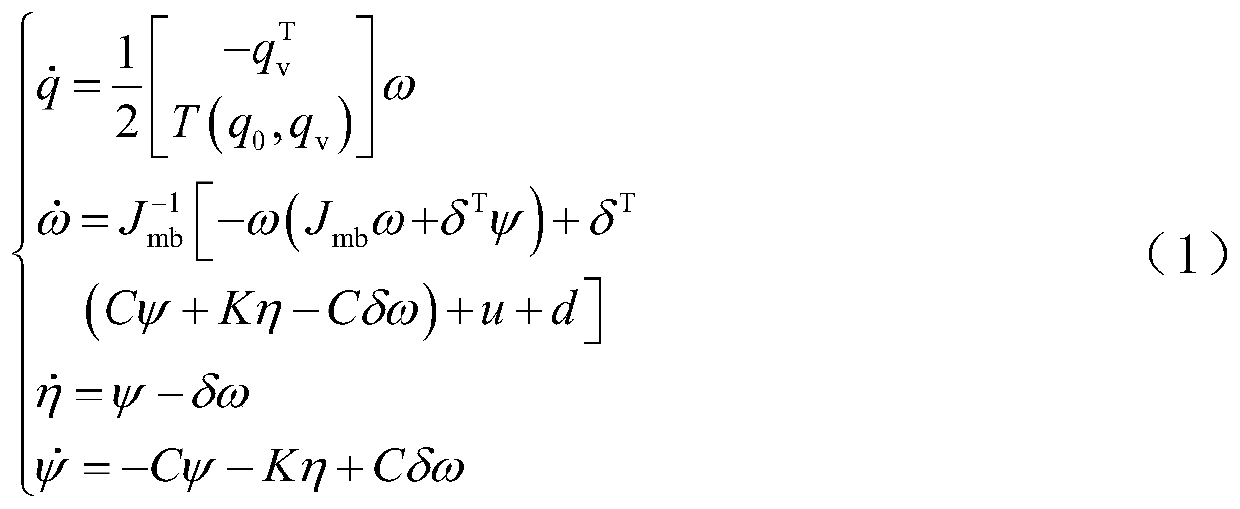
[0063] In step S1, based on the attitude quaternion, the kinematic equation and dynamic equation of the flexible spacecraft are established as follows:
[0064]
[0065] Among them, q is the unit attitude quaternion in the spacecraft body coordinate system, that is, ||q||=1 or q 0 is the scalar part of q, q v is the vector part of q, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More