Strawberry picking robot based on machine vision
A picking robot and machine vision technology, applied to picking machines, agricultural machinery and implements, harvesters, etc., can solve the problems that strawberry picking robots cannot meet market demand, and achieve easy picking, improved precision, and increased opening angle range Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
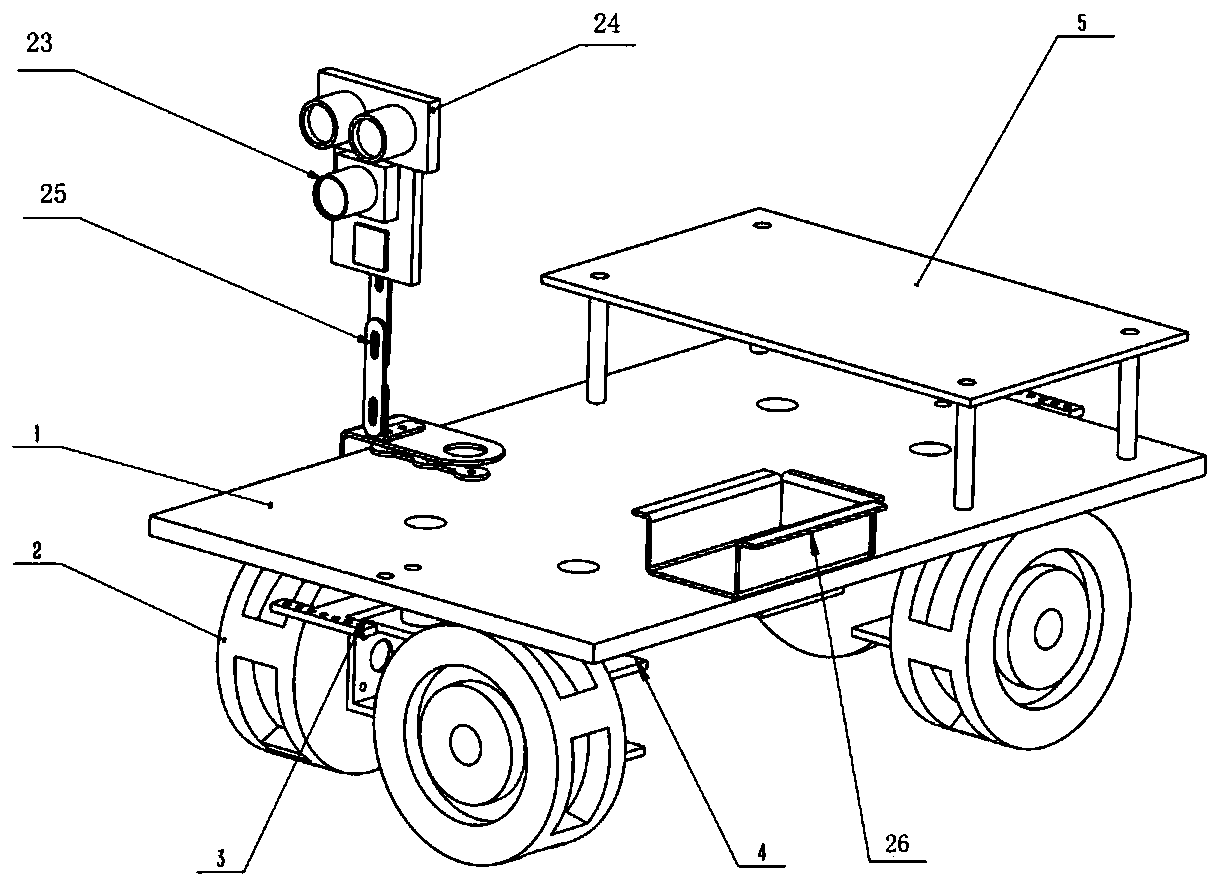
[0050]The strawberry picking robot based on machine vision of the present invention is mainly divided into a mechanical structure and an electric control part, and the mechanical structure includes a base 1, a walking mechanism 2, a picking mechanism, and a collecting mechanism 26, such as figure 1 shown. The running mechanism 2 is fixedly connected to the bottom of the chassis. Specifically, the running mechanism 2 adopts a 360-degree omnidirectional mobile wheel structure, for example, four Mecanum omnidirectional wheels are used. The wheel mechanism is simple, light in weight, easy to control, and has high displacement precision, so that the device can move in all directions, and overcomes the problem that the device is difficult to turn in a small range.
[0051] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More