

Particle Filter Centralized Tracking Method for Multistatic Radar Out-of-Sequence Measurement Fusion
A particle filter and multi-base technology, applied in measurement devices, using re-radiation, radio wave measurement systems, etc., can solve problems such as disorder, target fusion tracking performance deterioration, and tracking performance degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
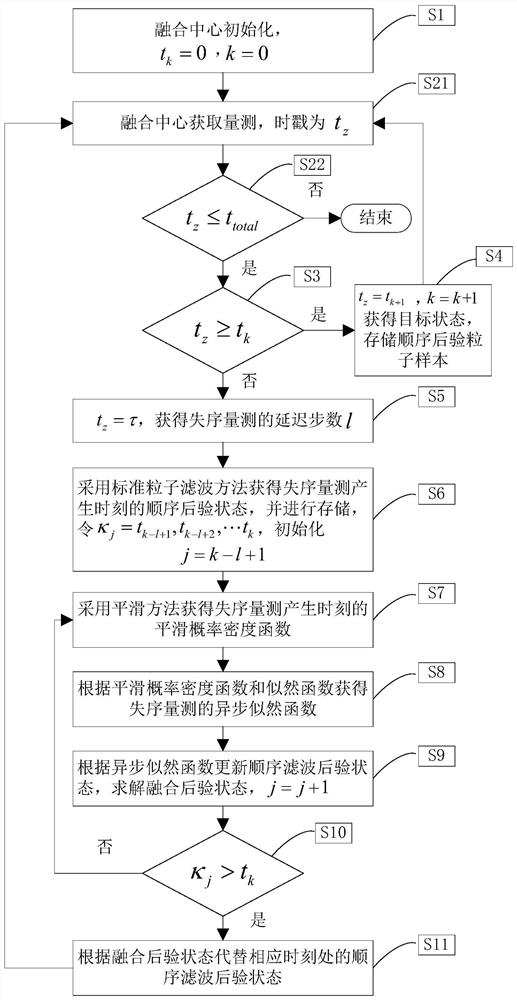
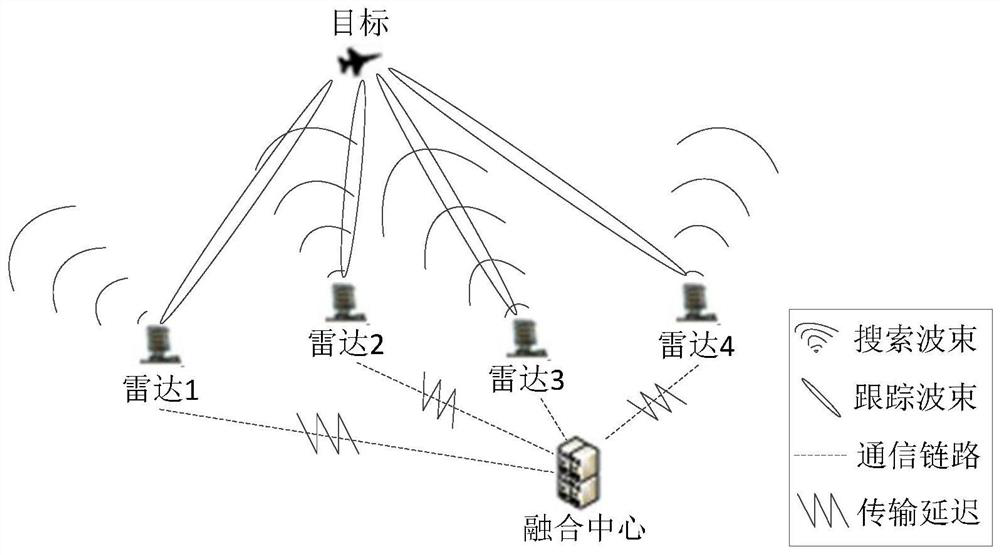
[0088] see figure 1 , the present invention provides a particle filter centralized tracking method for multistatic radar out-of-sequence measurement fusion, which is applied to a multistatic radar system. The multistatic radar system includes several radars, and the fusion center receives radar measurements, such as figure 2 shown.
[0089] In this embodiment, the present invention first initializes system parameters, including: the observation plane size of the multistatic radar system; the total number M of monostatic radars with transmitters; the total number N of monostatic radars with receivers; the total number of radar system observations time t total ; the initial state of the target Among them, (x(0), y(0)) represents the initial position of the target, Represents the initial velocity of the target; the initial state deviation of the targ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More